






































































Mini Pix

User Manual
Compatible with Fixed-wing/Glider/Multirotor/Helicopter/Car/Boat/Robot
CE FCC RoHS
Thank you for purchasing RadioLink flight controller Mini Pix.
To fully enjoy the benefits of this product and ensure safety, please read the manual carefully and set up the device as instructed steps.
If any problems found during the operation process, either way listed below can be used as online tech support.
Send mails to and we will answer your question at the earliest.
Send message to us on our Facebook page or leave comments on our YouTube page
If the product is purchased from the local distributor, you can also ask them for support and repair as prefer.
All manuals and firmware are available on RadioLink official website and more tutorials are uploaded. Or follow our Facebook and YouTube homepage to stay tuned with our latest news.
SAFETY PRECAUTIONS
Never operate models during adverse weather conditions. Poor visibility can cause disorientation and loss of control of pilots’ model.
Never use this product in a crowd or illegal areas.
Always check all servos and their connections prior to each run.
Always be sure about turning off the receiver before the transmitter.
To ensure the best radio communication, please enjoy the flight/driving at the space without interference such as high voltage cable, communication base station or launching tower.
WARNING
This product is not a toy and is NOT suitable for children under the age of 18. Adults should keep the product out of the reach of children and exercise caution when operating this product in the presence of children.
Water or moisture may enter the transmitter inside through gaps in the antenna or joystick and cause model instability, even out of control. If running in the wet weather (such as game) is inevitable, always use plastic bags or waterproof cloth to cover the transmitter.
FCC Statement
This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:
-- Reorient or relocate the receiving antenna.
-- Increase the separation between the equipment and receiver.
-- Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
-- Consult the dealer or an experienced radio/TV technician for help.
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions:
(1) This device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation.
Changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to operate the equipment.
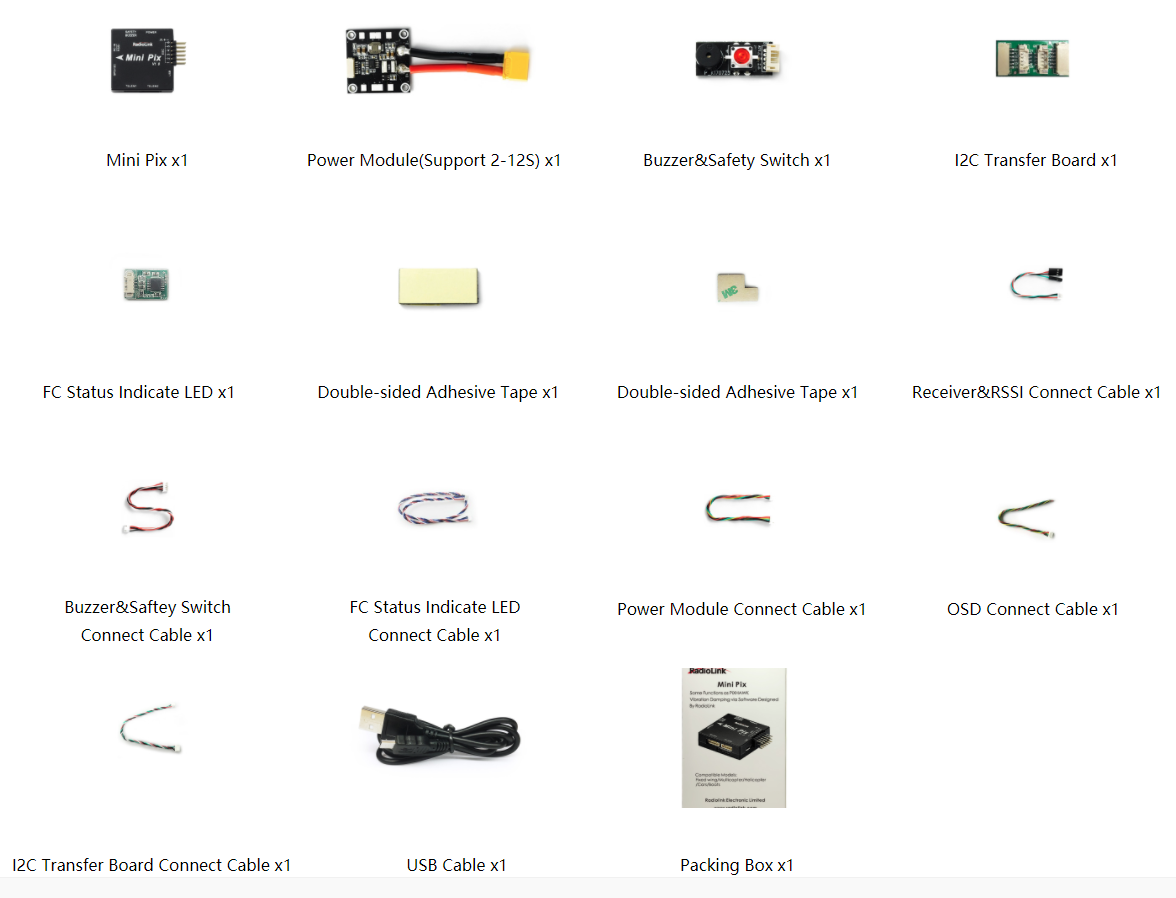
Packing List
No. |
Items |
Qty |
Unit |
1 |
Mini Pix |
1 |
Piece |
2 |
Power Module |
1 |
Piece |
3 |
Buzzer&Safety Switch Button |
1 |
Piece |
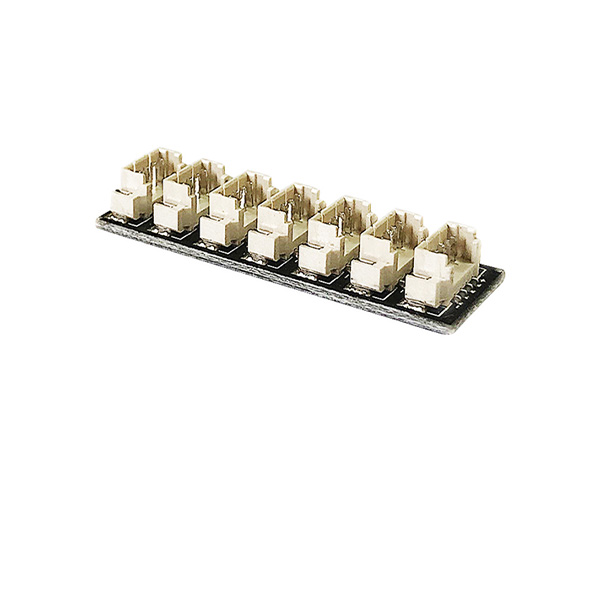
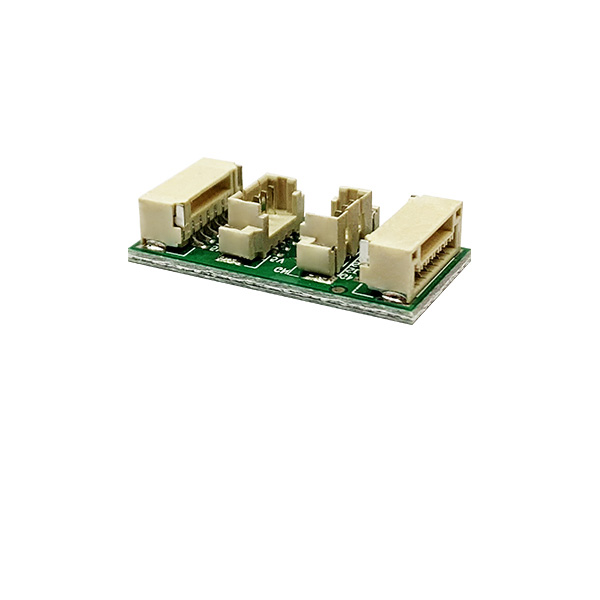
4 |
I2C Transfer Board |
1 |
Piece |
5 |
FC Status Indicate LED |
1 |
Piece |
6 |
Buzzer&Safety Switch Button Connect Cable |
1 |
Piece |
7 |
I2C Transfer Board Connect Cable |
1 |
Piece |
8 |
Power Module Connect Cable |
1 |
Piece |
9 |
Receiver&RSSI Connect Cable |
1 |
Piece |
10 |
OSD Connect Cable |
1 |
Piece |
11 |
FC Status Indicate LED Connect Cable |
1 |
Piece |
12 |
Double -sided Adhesive Tape |
2 |
Piece |
This manual is based on the ARDUPILOT, with setting with RadioLink transmitter AT9S as example. More details about how to use flight controller PIXHAWK-series please refer to:
Content
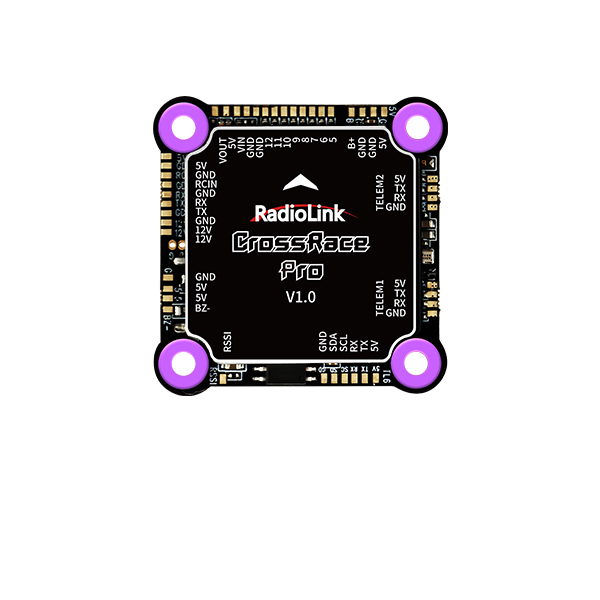
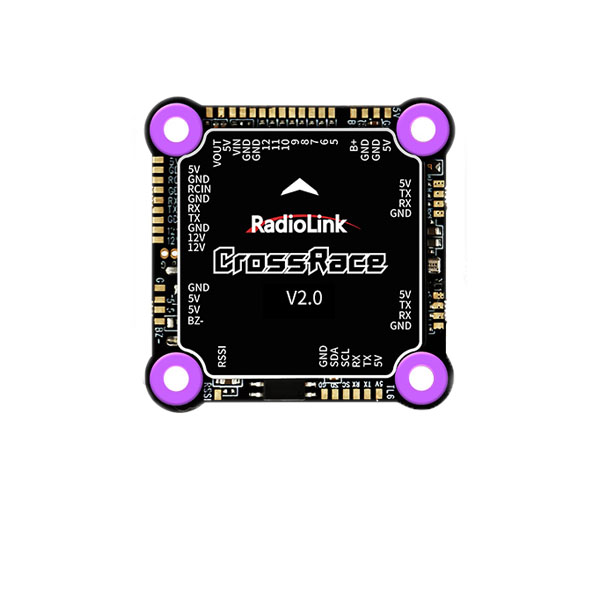
1. Mini Pix Introduction
Radiolink Mini Pix, with STM32F405VGT6 processor and LPS22HB barometer from America ST, MPU6500 accelerometer from INVENSENS, QMC5883L compass which same technology as HMC5983 from Honeywell, is your best choice that with top configuration and affordable price.
Shell completely closed to protect, prevent the interaction effects of air current wake on air pressure when flight. The main board has air pressure vent to ensure the accuracy of the barometer testing. Shell design and vibration damping by software make Radiolink Mini Pix achieved better Altitude Hold effect.
Based on the mature research and development of PIXHAWK, we take about one year to reanalyze and retest all the functions of all the models including fixed wing, multicopter and helicopter, make vibration damping by software to achieve better Altitude Hold effect come true. All the planes including helicopters, fixed wings and drones no need to add mounting frame.
Note The latest versions Mini Pix (V1.0II/V1.1) can ONLY flash firmware from RadioLink
Mission Planner . But not that from official Mission Planner.
1.1 Spare Parts
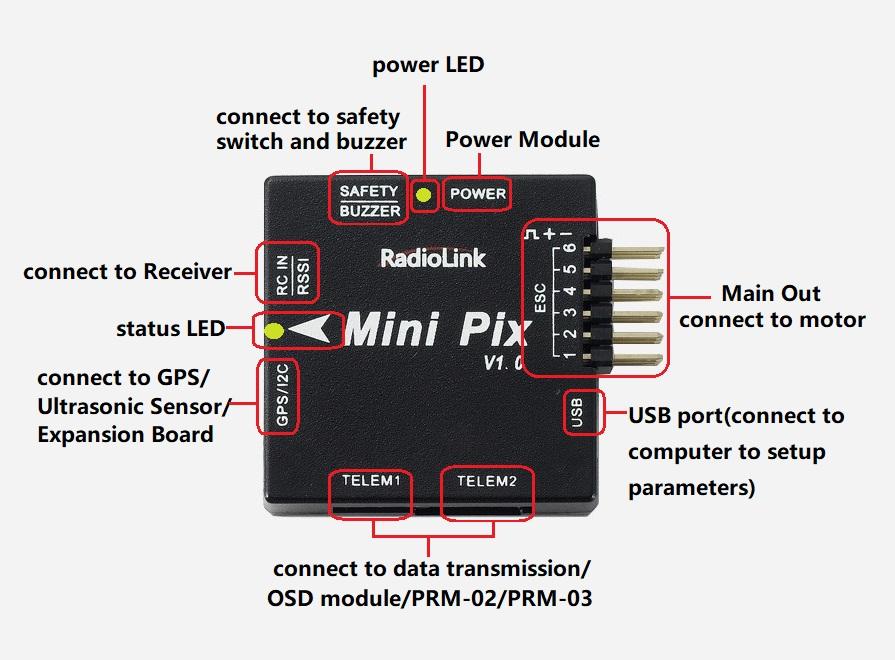
1.2 Connectors

1.3 Parameters
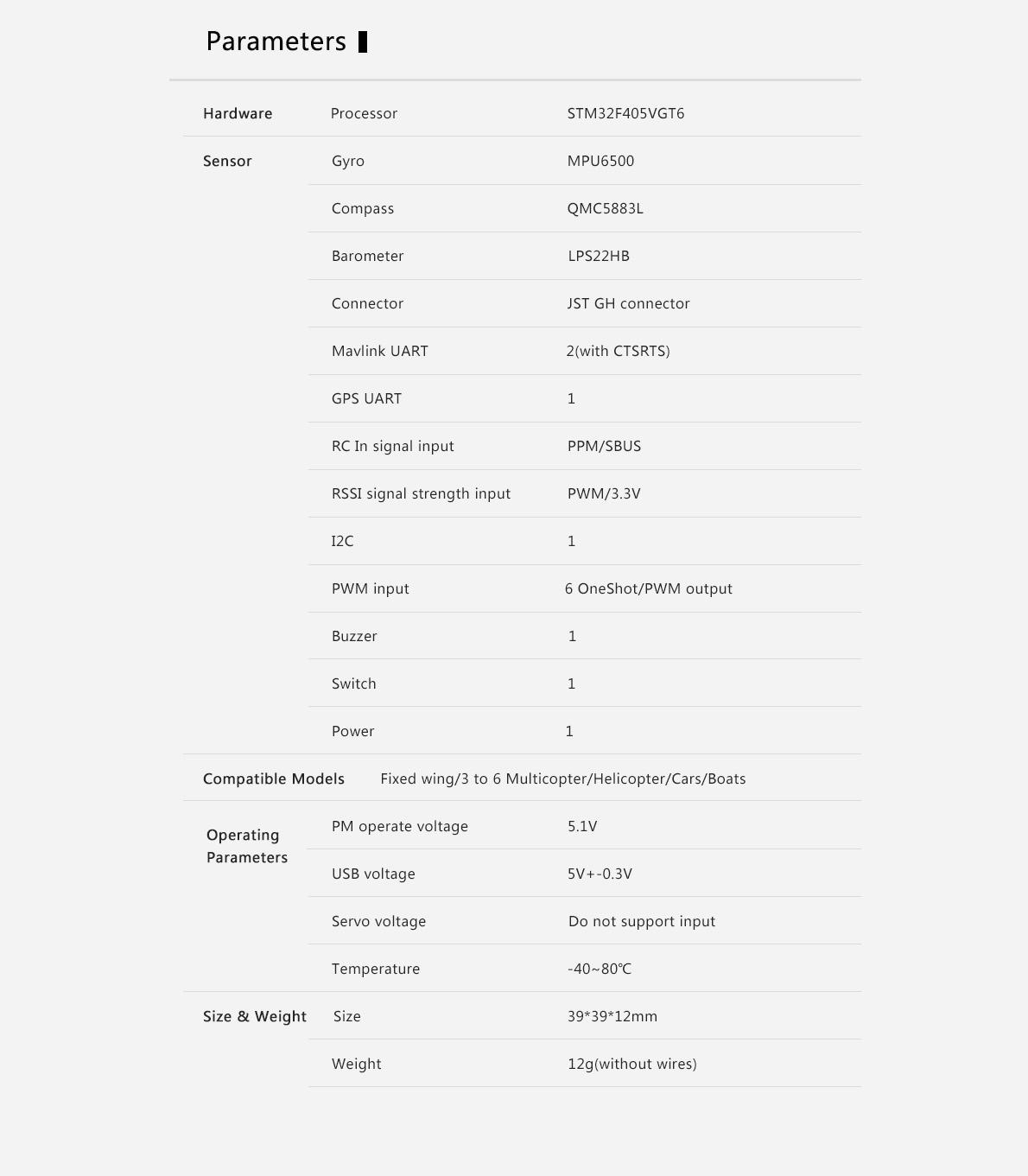
Power Module V2.0
Input: 2-12S
Output: 5.1V 2A
1.4 Advices
For the users who firstly use Mini Pix, we suggest that you use Mini PIX following below steps:
1. You have to install the mission planner and driver from here and familiar with the menu.
Download the latest Mission Planner from here:
Download the driver form here:
To establish a connection, you must first choose the communication method/channel you want to use, and then set up the physical hardware and Windows device drivers. You can connect the PC and autopilot using USB cables, , , IP connections etc.
Download the update firmware by USB cable if you need.
Connect Mission Planner to AutoPilot, and then connect receiver to AutoPilot to finish the calibration of transmitter, Accelerometer and compass.
Setup RC transmitter flight mode.
Assemble aircraft and finish the pre-flight checklist.
PID usage.
Advanced configuration.
2. Mission Planner
2.1 Install Mission Planner
Net Framework 4.6.2 need to be installed first before Mission Planner; you can download form here:
Note The Net Framework 4.6.2 file will automatically download when website is clicked.
Then download the Mission Planner from https://www.radiolink.com/minipix_missionplanner
"
Note The Net Framework 4.6.2 file will automatically download when website is clicked.
Then download the Mission Planner from https://www.radiolink.com/minipix_missionplanner
Open the Microsoft installer file and select Run to run the installation utility.
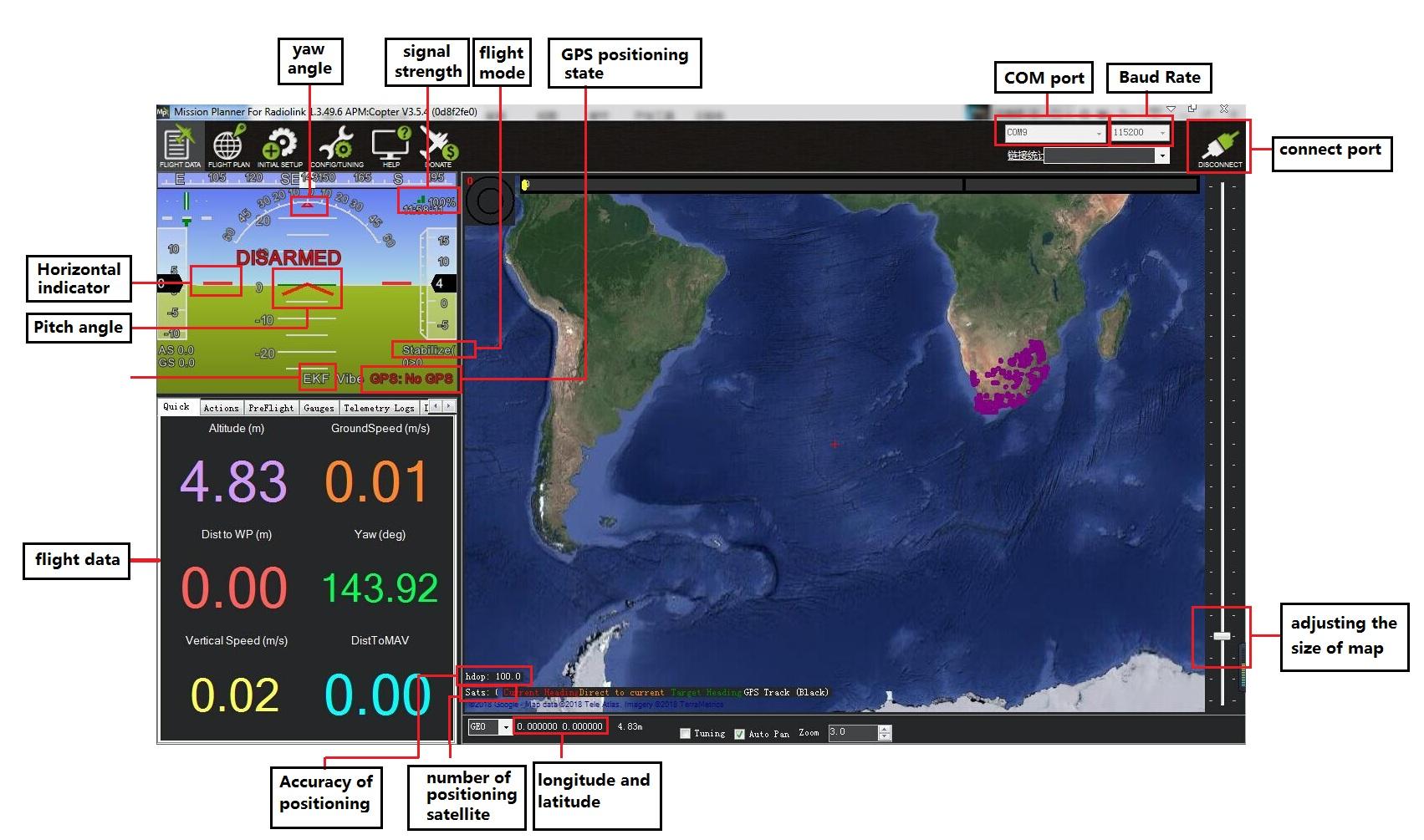
2.2 Mission Planner Introduction
Once installation is complete, open Mission Planner by clicking on its system icon.
Once the installation of Mission Planner and driver is done, there will several pop-ups when you open the MP at the first time. The first pop-up clicks Yes and the others click NO.
There are six Menu Button in main menu.
FLIGHTDATA: flight attitude and data will show in real time on MP
FLIGHTPLAN: planning the flight mission
INTIAL SETUP: for firmware installation and update, Mandatory Hardware and Optional Hardware setup
CONFIG/TUNING: including detailed PID setup and parameters change
SIMULATION: make MINI PIX work as a simulator after upgrade a special simulation firmware
HELP: you can get help when you have questions about MP
3. Initial Setup
First, you have to upgrade the firmware you need when you the first time ready to use MINI PIX.
Radiolink Mini Pix is default with quadcopter firmware, you have to install the right firmware if you use the other frame drone.
Please connect your Mini Pix and computer via USB cable. Open the Mission Planner to loading the firmware you need to your Mini Pix.
Attention:
(1) Do not click CONNECT before you upload the new firmware, please click DISCONNECT if you have connected successful before. Upload new firmware will be not success if you have connected already.
(2) Please do not upload new firmware by wireless data transmission because it has missed the reset signal.
(3) If there’s without firmware version number, it means failed upload new firmware. It may cause of network problem, please re-upgrade firmware until shows the version.
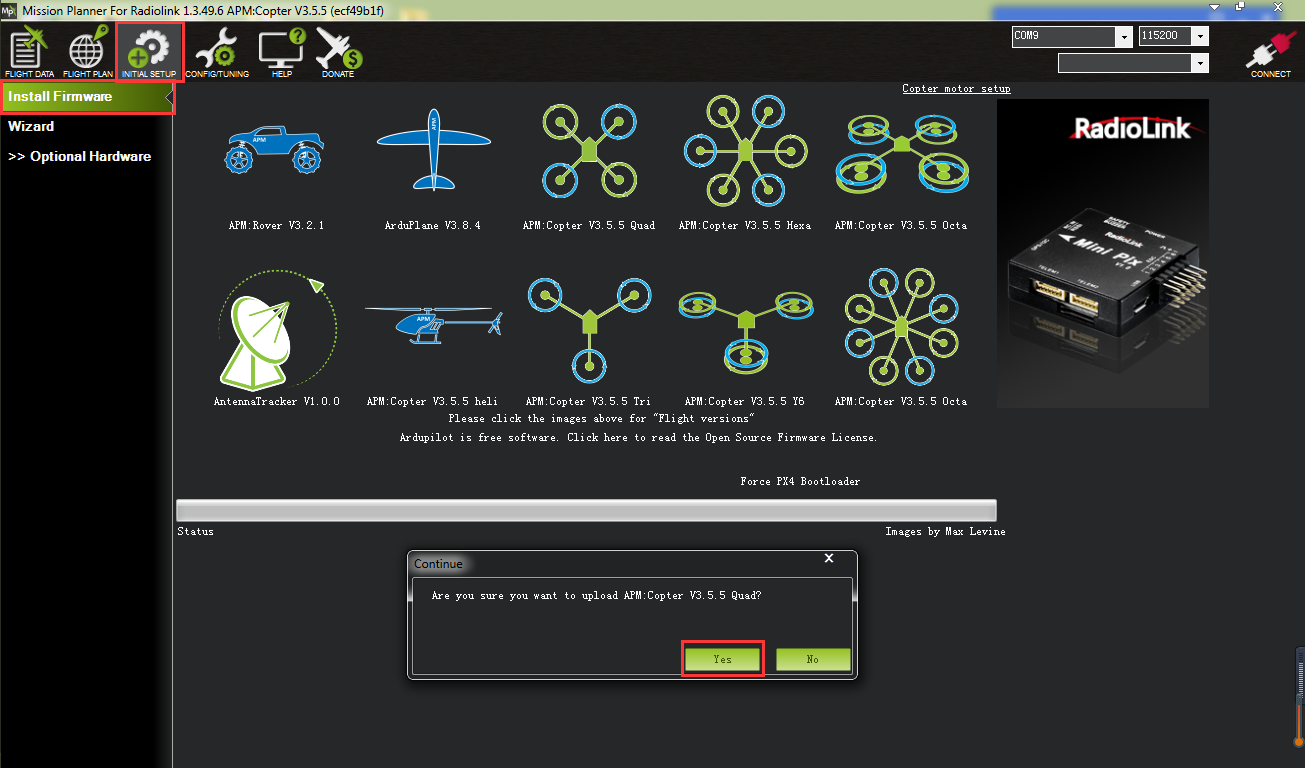
Click “Yes” to install the firmware,
Disconnect the USB cable, click OK and then reconnect USB cable immediately (Pay attention: Mini Pix will have failed to connect if there are more than one COM, please remove other equipment if disconnect).
Red status LED means the MINI PIX is loading the firmware.
After upgrade firmware 3.1 or after version 3.1, there will be a pop-up warning motors will run at idle speed after disarmed.
Please click “CONNECT” to connect your Mini Pix and computer when firmware has installed successful. it turns to green means connect successful.
Pay attention:
Please set Layout from “Basic” to “Advanced” in CONFIG/TUNING menu if any of the three questions as below encontered when you installing the Mission Planner.

(1) It takes a long time to read the parameters.
(2) There is no option of “Load custom firmware” or “Pick previous firmware”.
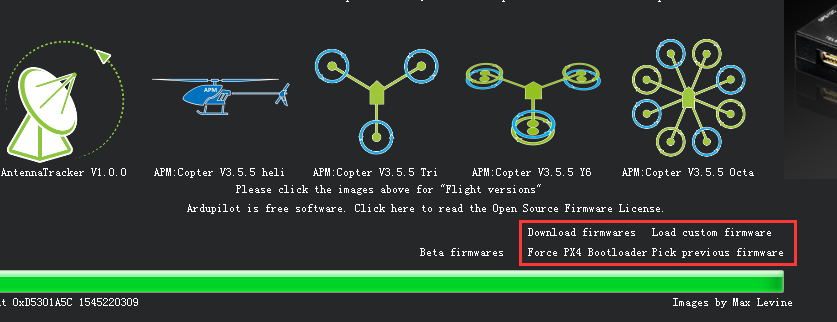
(3) There’s no Full Parameter List in INITIAL SETUP.
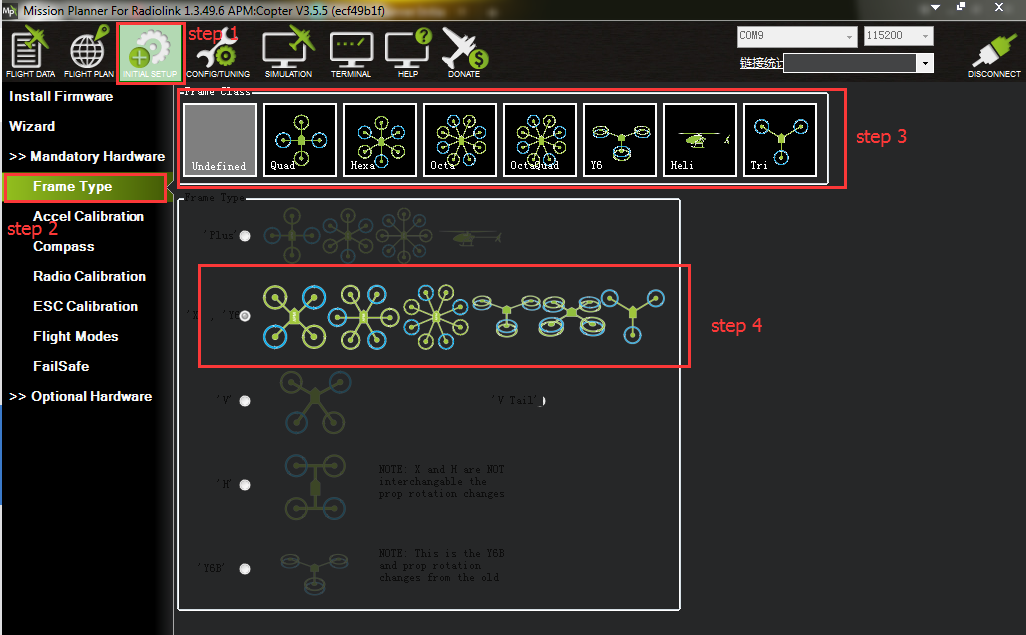
3.2 Frame Type
Please setup as below:
INITIAL SETUP
Mandatory Hardware->Frame Type
Choose Quad or Hexa or other frame types as you need
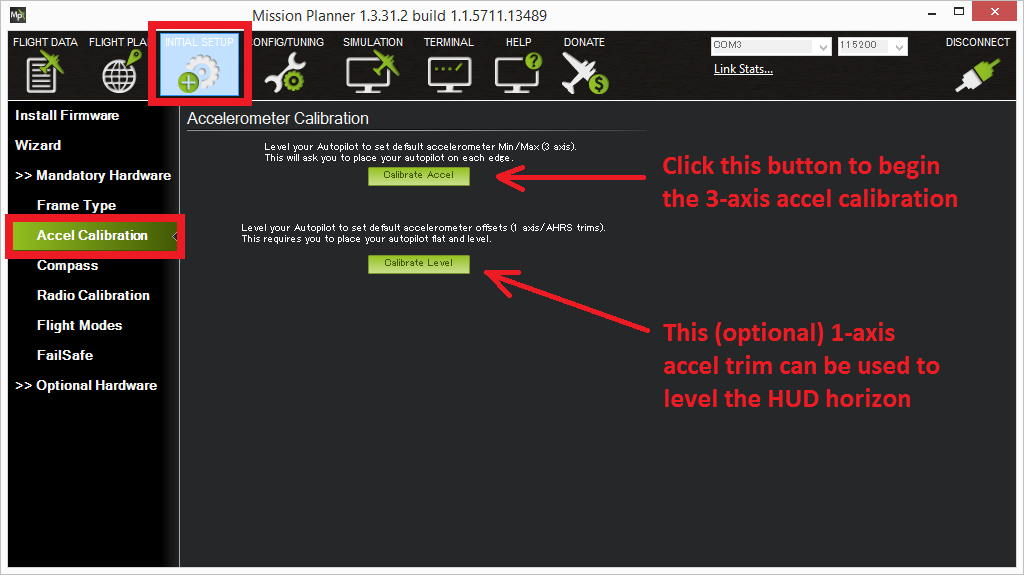
3.3 Accelerometer Calibration
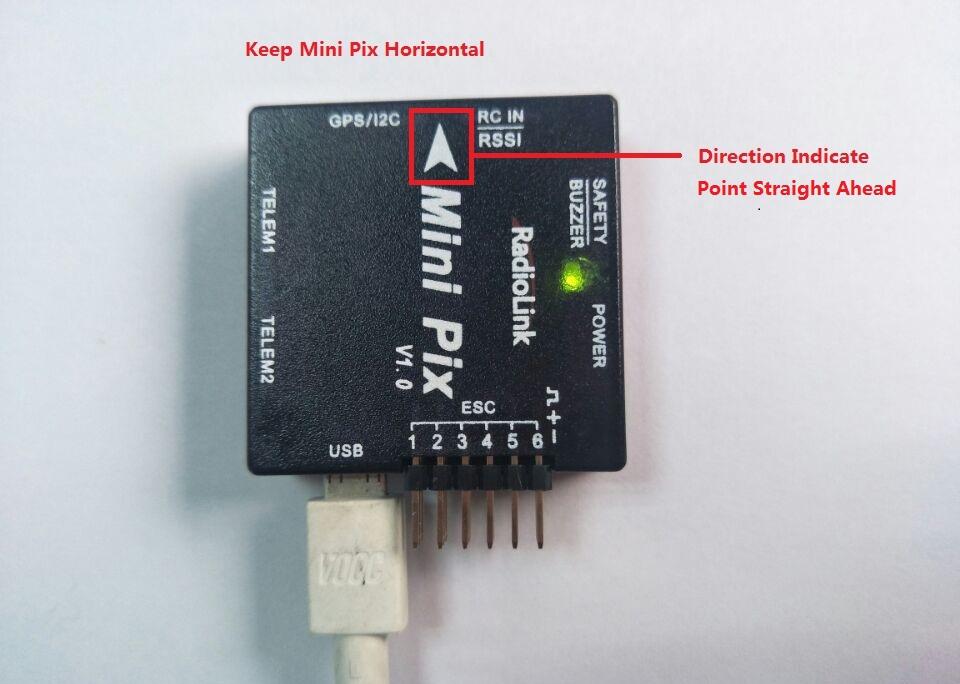
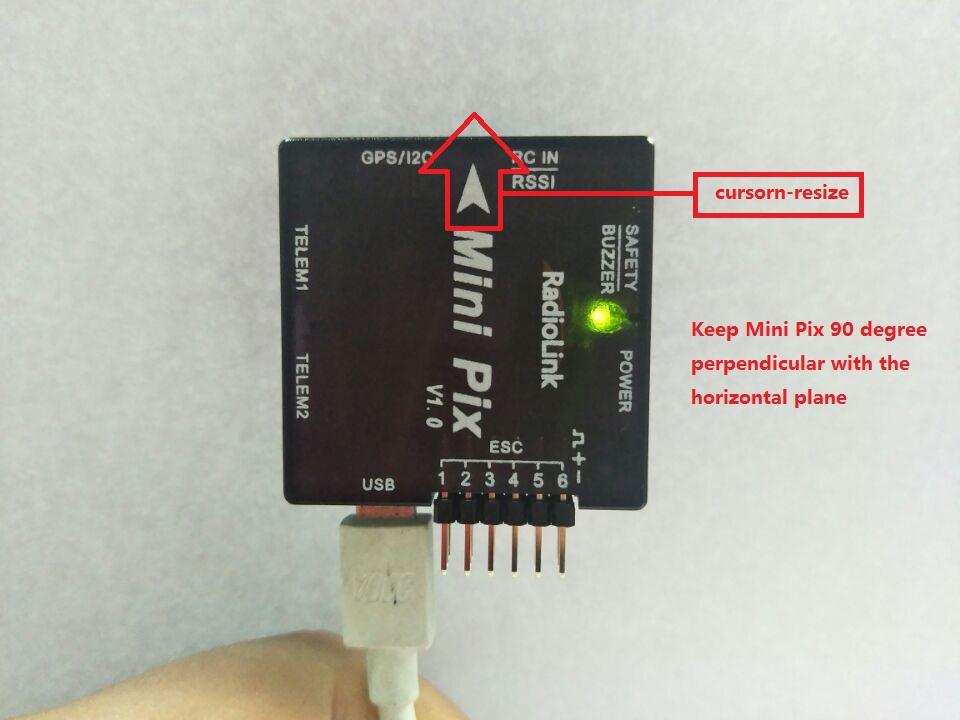
Make sure the Mini Pix is keeping horizontal when do the accel calibration.
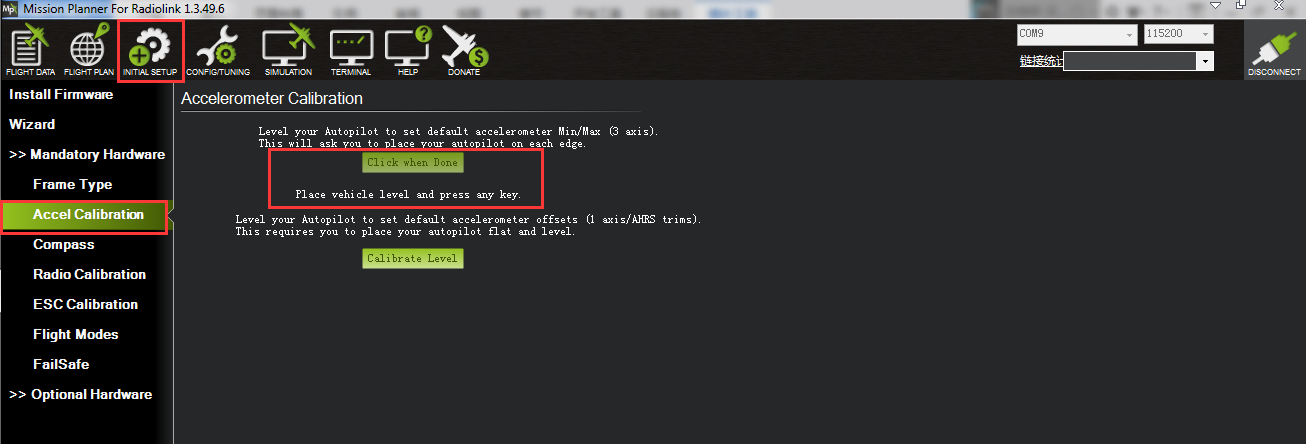
1. Place vehicle level and press any key to save setting.
2. Place vehicle on its LEFT side and press any key to save setting.

3. Place vehicle on its RIGHT side and press any key to save setting.

4. Place vehicle DOWN and press any key to save setting.

5. Place vehicle UP and press any key to save setting.
6. Place vehicle on its BACK and press any key to save setting.

3.4 Compass Calibration
3.4.1 By Mission Planner
There are two situations about compass calibration:
Without GPS, use internal compass
With GPS, use external and internal compass.
Calibrate interface will shows as picture below when use with GPS.
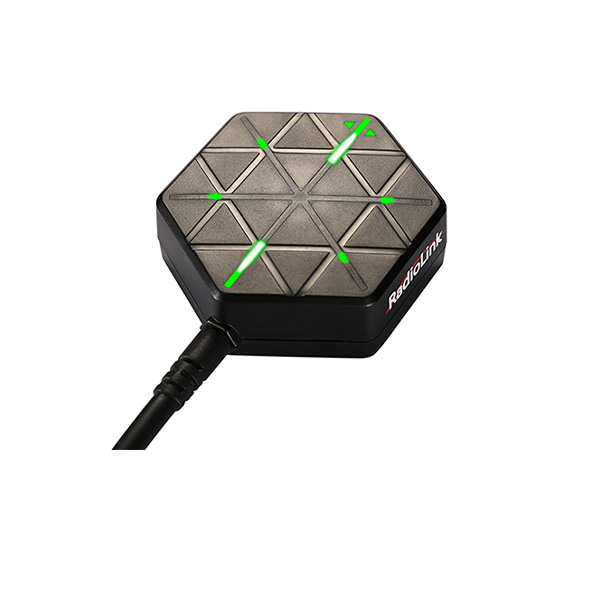
If the GPS mounted with the same direction with flight controller, then it need not to setup the direction of GPS in MP but if you mounted the GPS with the different direction of MINI PIX, you have to setup in the MP.
Compass calibrate Positioning Indicate
Please use Mission Planner
Arrows shows the front, point to the Humanized positioning green LED indicate.
same direction as the flight controller. The green LED will flicker when TS100 have
Keep the same direction with flight controller. positioning.
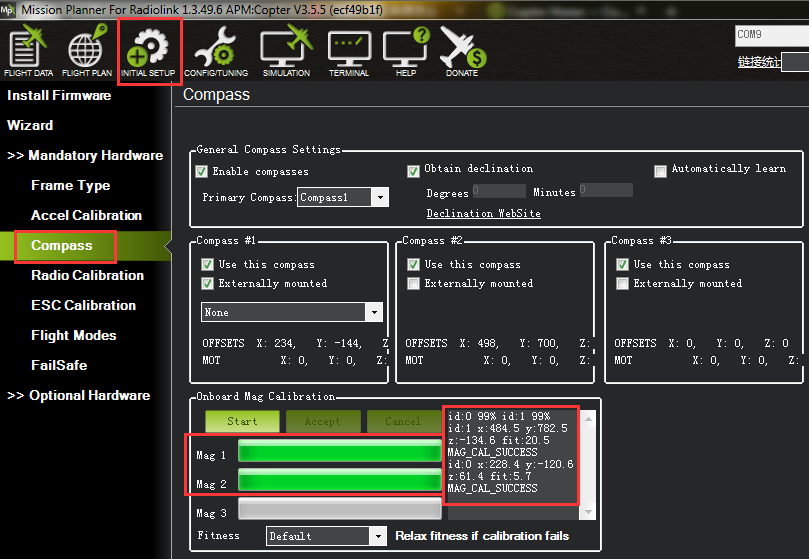
Please fixed Mini Pix and TS100, then click “Start” and turn Mini Pix and TS100 till the progress bar of Mag 1 and 2 to the end and comes out the MAG_CAL_SUCCESS marked words.
Calibrate the compass as these steps below:Hold the vehicle in the air and rotate it slowly so that each side (front, back, left, right, top and bottom) points down towards the earth for a few seconds in turn.
The mission planner will keep recording the data that collected by the compass sensor and the progress bar and the percentage will keep change when you calibrate the compass, if the percentage have not changed, please check if the compass is connect success.
The mission planner will remind you when the compass has calibrated success.
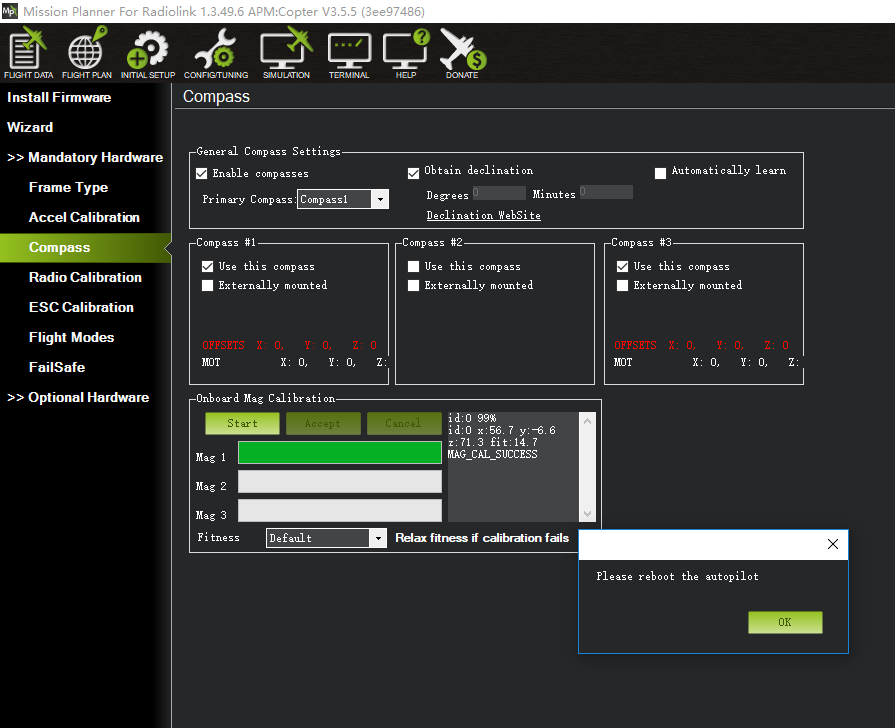
Click OK and then reconnect MINI PIX to computer, compass calibrate success after restart the MINI PIX.
Attention:
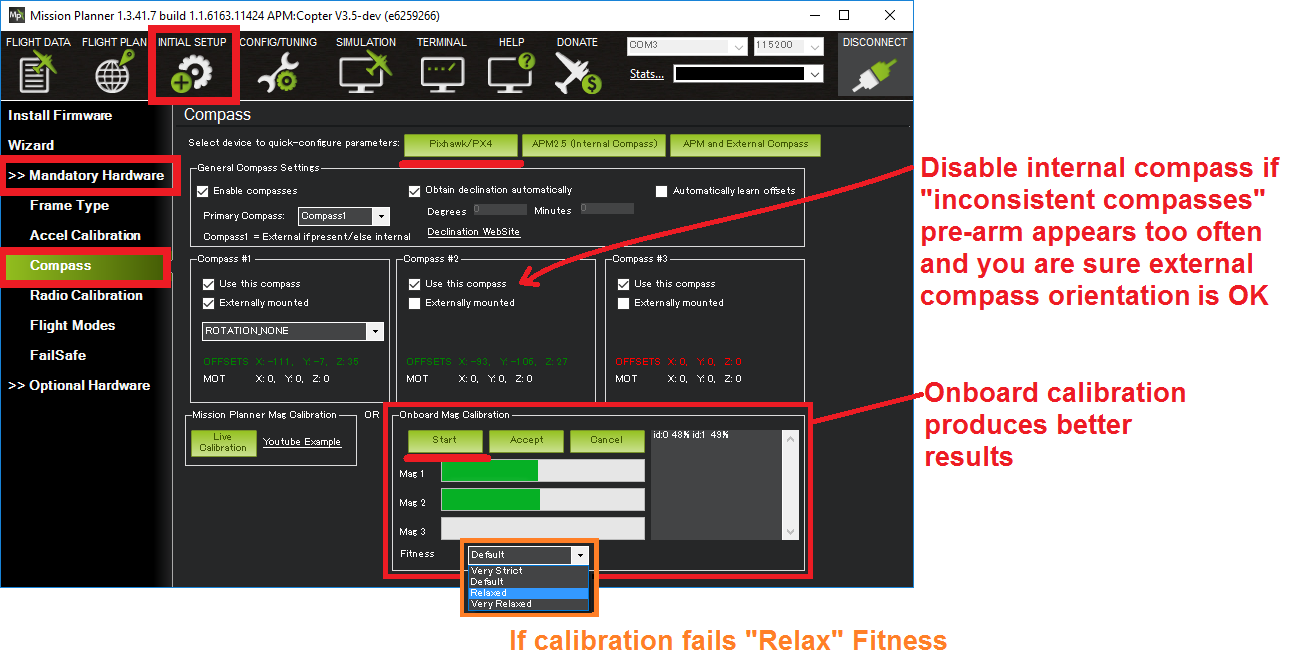
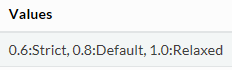
When the progress bar moves to 100 and then restart from 0, it may because of the wrong calibrate action or interference. You can have a try to calibrate again till compass calibrate success, or setup the Fitness is Relaxed and recalibrate.
3.4.2 By Transmitter
Connect the Mission Planner before compass calibration with transmitter, select Radio Calibration in the INITIAL SETUP menu (If this step is already done, no need to recalibrate). Select the corresponding firmware when connecting the transmitter (e.g., If it’s the acrobatic model that you are setting, firmware of same aircraft should be chosen in the Model Type of BASIC MENU with throttle phrase reversed set in the transmitter. Signal output of receiver should be SBUS in BLUE indicator)
When calibrating compass with the transmitter, no need to connect Mini PIX to Mission Planner. Transmitter can be used directly to calibrate the compass of Mini PIX.
Buzzer need to be installed as the notification when calibrating the compass with the transmitter.
Power on the transmitter, the throttle gimbal stick should be at the lowest position.
Power on Mini Pix and wait until its self-check is complete. The normal notification should be RED indicator flashes quickly-- buzzer makes DEE sounds -- Red and Green indicators flash quickly--Red/Green/Blue indicators flash intervalley-red and green indicators flash quickly; then self-check is done.
Toggle the throttle gimbal stick to the top position(max.) and YAW to the rightest and hold these positions for at least 2s after a D sound is made by the buzzer, then two D sounds after 2-3s, then the buzzer will make continuous DD sounds like once per second, meaning the compass calibration mode by transmitter is activated.
Then rotate the aircraft as below pics
When there are three D sounds made by the buzzer, it means the compass calibration is done with success. Restart the flight controller and it’s enabled.
Note
If calibration fails, there would be two D sounds from the buzzer then continuous DD sounds like once per second, meaning the flight controller restarts to calibrate. Please repeat the above steps.
If it doesn’t succeed after several trials, or you are asked to cancel during the calibration, toggle the throttle gimbal stick to the top position(max.) and YAW to the rightest and hold these positions for more than 2s to cancel.
If the calibration can’t be made with transmitter, it’s advice to cancel it and calibrate with the Mission Planner instead.
3.5 Radio Calibration
This article shows how to perform radio control calibration using Mission Planner.
RC transmitters are used to control vehicle movement and orientation. Copter and Plane minimally control throttle, pitch, roll and yaw, while on Rover we just control throttle and roll. Each of these control signals are mapped to transmitter stick/switch(s) and in turn to autopilot channels from the connected receiver.
Calibrating each of the transmitter controls/channels is a straightforward process - simply move each of the enabled sticks/switches through their full range and record the maximum and minimum positions.
There are two main transmitter configurations:
Mode 1: left stick controls pitch and yaw, the right stick will control throttle and roll.
Mode 2: left stick controls throttle and yaw; the right stick will control pitch and roll.
Copter default channel mappings are:
Channel 1: Roll
Channel 2: Pitch
Channel 3: Throttle
Channel 4: Yaw
Channel 5: Flight modes
Channel 6: (Optional) In flight tuning or camera mount (mapped to transmitter tuning knob)
Unused channels can be mapped to control additional peripherals.
For safety, you should disconnect the battery and/or remove propellers before preforming radio calibration.
Bind your transmitter and receiver before calibrate radio, connect MINI PIX to computer via USB cable and then turn on transmitter. The RC receiver ask to connect to the RC port of MINI PIX.
The transmitter will make AT9S as an example in this manual.
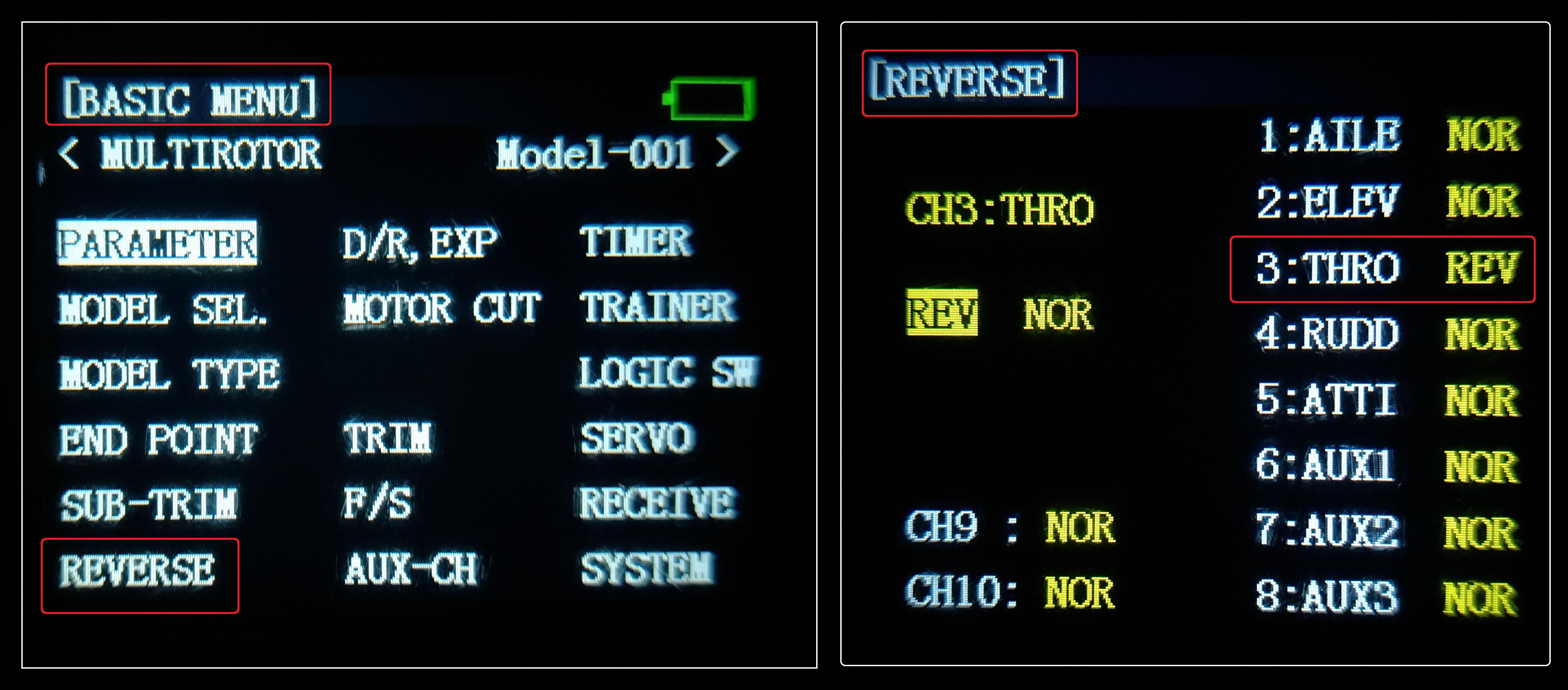
1. Press Mode button about one second to into BASIC MENU, and then turn the dial to set MODE TYPE as MULTIROTOR (press Push button 1 second—press Push button again when the display pop-ups “Are you sure?”— you will find out DDD sounds come out with “Please wait…”), the mode type MULTIROTOR have setup success after the DDD sounds have finished.

Setup CH3: THRO REV in REVERSE menu (setting steps: Press Mode button about one second to into BASIC MENU, and then turn the dial to choose REVERSE, press Push button to into the REVERSE menu, turn the dial to setup 3: THRO REV, press End to back to Basic menu.
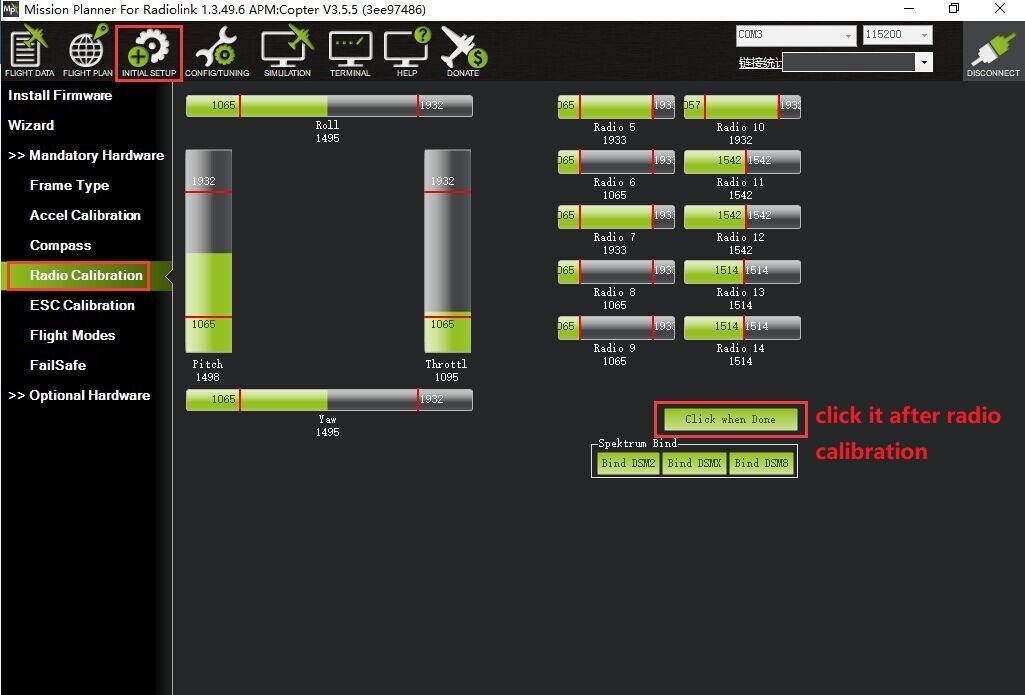
Radio Calibration Steps:
1. Open Mission Planner
2. Choose the right COM and Baud rate
3. Click the CONNECT
4. Choose INITAIL SETUP—Mandatory Hardware—Radio Calibration
5. Click “Calibrate Radio”

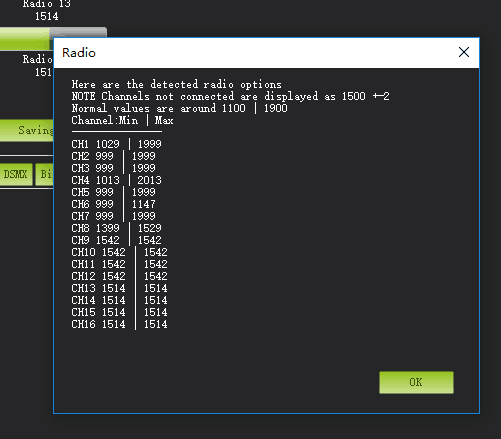
There are two tool pop-ups after you click “OK”, one for make sure both your transmitter and receiver are powered on and connected, and the motor of your drone does not have power and without propellers.
And then click “OK” and move all RC sticks and switches to their extreme positions so the red bars hit the limits.
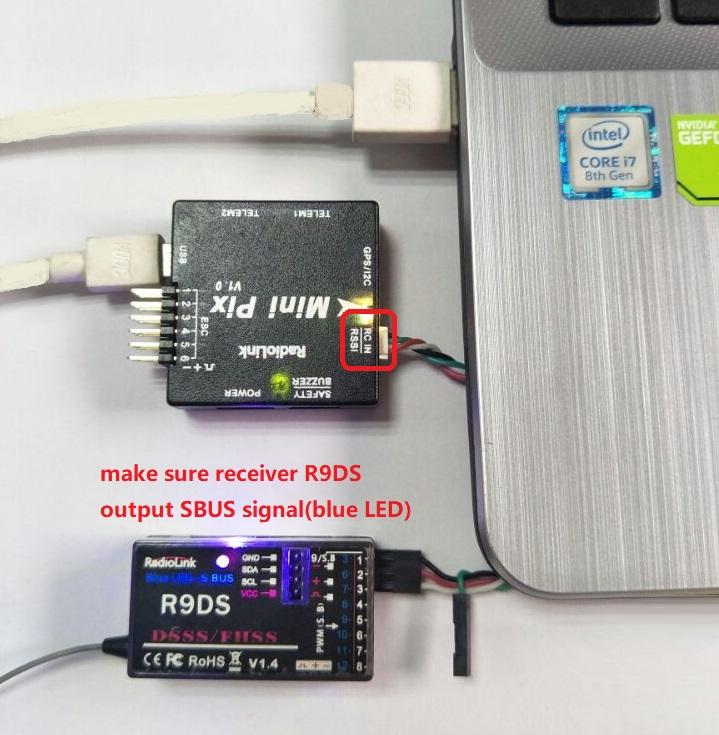
If the red bars have not any change when you move the sticks, please check the receiver have connect success or not, make sure the receiver (maybe R9DS) is output SBUS signal (the blue LED of R9DS means work as SBUS signal). You can check if every corresponding red bar for every channel is work as below:
CH1: low position = roll (towards the left), up position= roll (towards the right).
CH2: low position =pitch(forward), up position =pitch(backwards).
CH3: low position =reduced speed, up position =speed up.
CH4: low position = yaw (towards the left), up position = yaw (towards the right).
Click OK to save the radio calibration data.
3.6 Flight Modes
 Mini Pix has 20 flight built-in flight modes, 10 of which are regularly used. There are modes to support different levels/types of flight stabilization, a sophisticated autopilot, a follow-me system etc. Flight modes are controlled through the radio (via a ), via mission commands, or using commands from a ground station (GCS) or companion computer. You can setup six flight modes once and max setup eight modes combine with AUX-CH (CH7 and CH8).
Mini Pix has 20 flight built-in flight modes, 10 of which are regularly used. There are modes to support different levels/types of flight stabilization, a sophisticated autopilot, a follow-me system etc. Flight modes are controlled through the radio (via a ), via mission commands, or using commands from a ground station (GCS) or companion computer. You can setup six flight modes once and max setup eight modes combine with AUX-CH (CH7 and CH8).
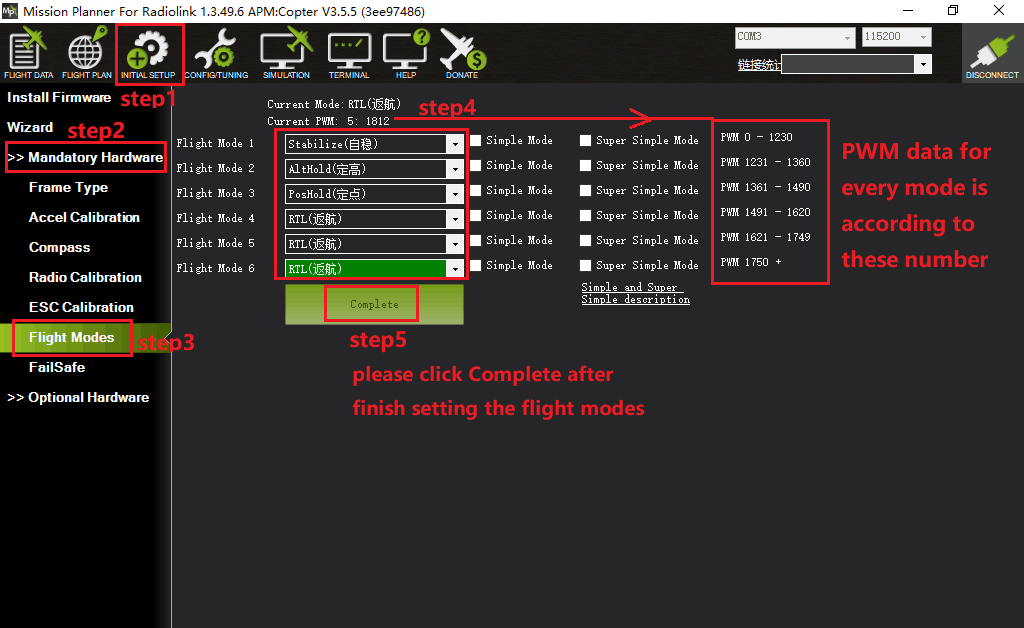
Flight modes setting steps:
1. Connect MINI PIX and receiver (connect the RC port of MINI PIX, and make sure receiver work as SBUS signal).
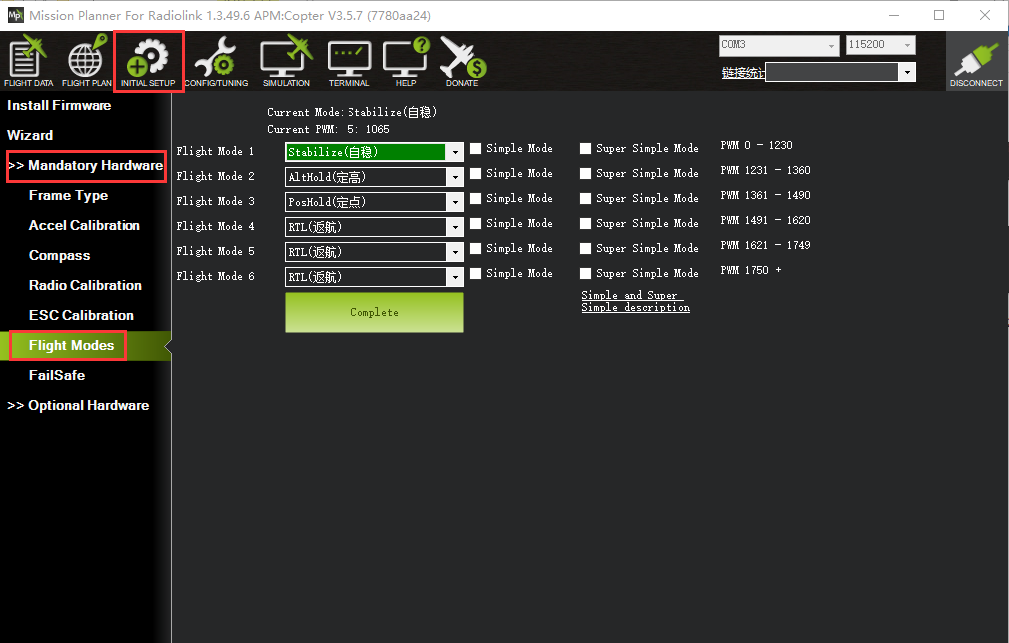
2. Make sure transmitter bind to receiver success. 3. Make sure MINI PIX connect to Mission Planner success and click INITIAL SETUP—Mandatory Hardware—Flight modes, you can setup the flight modes you want in this menu.
In flight modes menu, it’s very clear that the flight modes, the PWM numerical interval of six flight modes you have set and choose Simple Mode/Super Simple Mode or not.
Most of the RC fans setup the Flight Mode 1 is Stabilize, the other five flight mode will be setup according to users’ flight habit.
First, you have to setup flight mode in transmitter. The setting steps as below:
 1. Power on and turn on your transmitter.
1. Power on and turn on your transmitter.
2. Press Mode button twice to into ADVANCE MENU, press Push button into ATTITUDE setting menu, CH5 is default to the attitude control channel and please choose a 3 Posi-SW and a 2 Posi-SW to control the attitude.
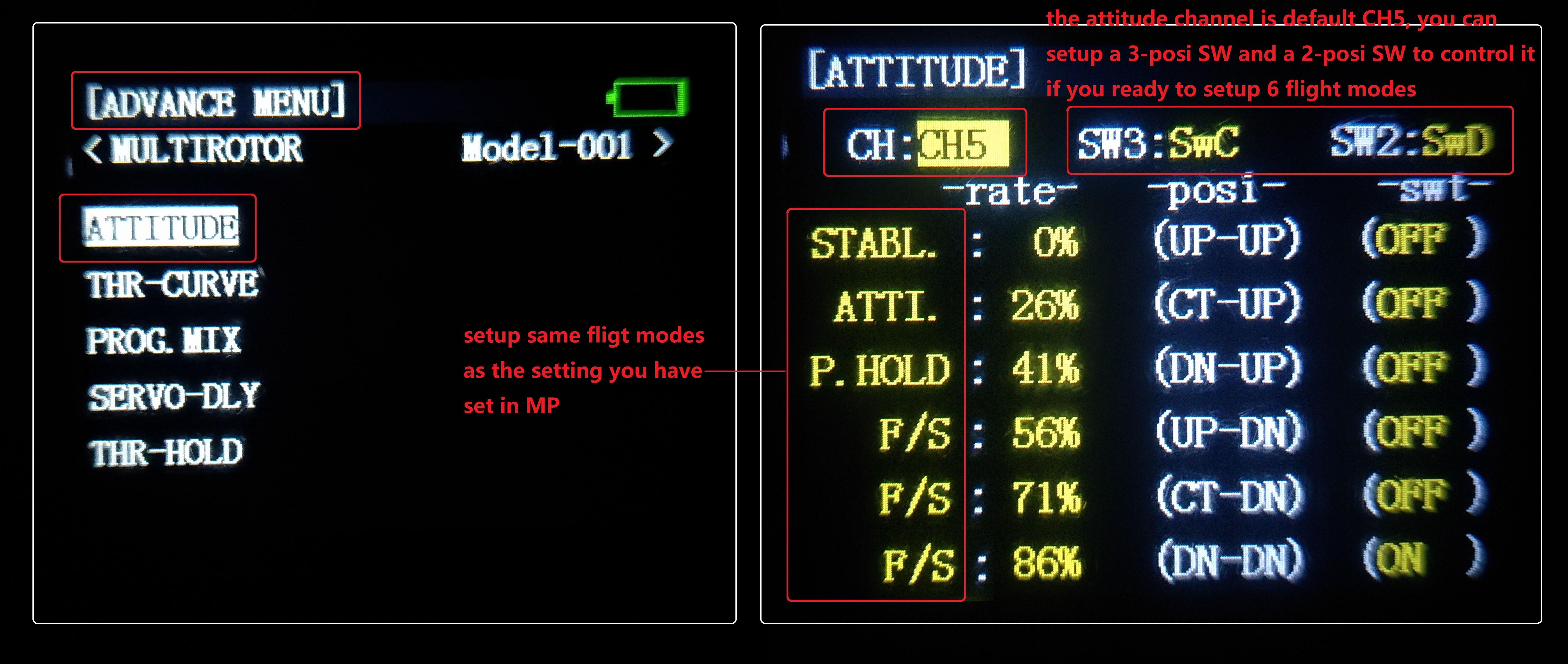
3.Setup Flight Mode 1 is Stabilize both in Mission Planner and transmitter.
Make sure the -swt- is ON (by press the 3 Posi-SW or 2 Posi-SW to make it ON or OFF) and then you can setup the PWM data.
Setup the PWM value according to the default numerical interval (change the value by turn the dial, press the Push button when you choose the right value.
3.6.1 Stabilize Mode
Stabilize mode allows you to fly your vehicle manually, but self-levels the roll and pitch axis.
If you’re learning to fly, try or instead of Stabilize. You’ll have fewer crashes if you don’t need to concentrate on too many controls at once.
(1) Pilot’s roll and pitch input control the lean angle of the copter. When the pilot releases the roll and pitch sticks the vehicle automatically levels itself.
(2) Pilot will need to regularly input roll and pitch commands to keep the vehicle in place as it is pushed around by the wind.
(3) Pilot’s yaw input controls the rate of change of the heading. When the pilot releases the yaw stick the vehicle will maintain its current heading.
(4) Pilot’s throttle input controls the average motor speed meaning that constant adjustment of the throttle is required to maintain altitude. If the pilot puts the throttle completely down the motors will go to their minimum rate (MOT_SPIN_ARMED) and if the vehicle is flying it will lose attitude control and tumble.
(5) The throttle sent to the motors is automatically adjusted based on the tilt angle of the vehicle (i.e. increased as the vehicle tilts over more) to reduce the compensation the pilot must do as the vehicle’s attitude changes.
Always switch into a manual mode such as stabilize if the autopilot fails to control the vehicle. Maintaining control of your copter is your responsibility.
3.6.2 Acro Mode(FPV)
Acro mode (Rate mode) uses the RC sticks to control the angular velocity of the copter. Release the sticks and the vehicle will maintain its current attitude and will not return to level. Acro mode is useful for aerobatics such as flips or rolls, or FPV when smooth and fast control is desired.
ACRO mode trainer
ACRO_TRAINER setting
0 is disabled. This means the pilot operates in full Rate control with no automatic leveling nor angle-limiting performed by the autopilot.
1 is automatic leveling. The vehicle will automatically return to the level when the pilot releases the sticks. The aggressiveness with which it returns to level can be controlled with the ACRO_BAL_ROLL and ACRO_BAL_PITCH parameters. The default of 1.0 will cause it to return to level at up to 30deg/sec. Higher values will make it return more quickly.
2 is Default to automatic leveling and lean angle limited. Includes the automatic leveling as option #1 but in addition the vehicle will not lean more than 45 degrees (this angle can be configured with the ANGLE_MAX parameter).
The trainer can be enabled/disabled using the Ch7/Ch8 switches. With a 3 position switch the off position (i.e. PWM < 1200) will disable the trainer, middle position will enable option #1 (automatic leveling) and the top position (i.e. PWM > 1800) will enable option #2 (leveling and lean angle limited). With a 2-position switch only options #0 (disabled) and option #2 (leveling & limited) are possible.
Parameters Setting
ACRO_RP_P controls the rotation rate for the roll and pitch axis. The default, 4.5, will command a 200deg/sec rotation rate. Higher values lead to higher rotation rates, lower to slower rotation rates. ACRO_YAW_P controls the rotation rate for the yaw axis. The default, 4.5, like roll and pitch, will command a 200deg/sec rotation rate.
ACRO_RP_EXPO Acro roll/pitch Expo to allow faster rotation when stick at edges
ACRO_Y_EXPO Acro yaw expo to allow faster rotation when stick at edges
ACRO_EXPO is an amount of Exponential to apply to the pilots stick inputs that only applies to ACRO mode. By default, ACRO mode is much more responsive, even in the center-sticks positions, than the other modes, so this parameter allows the pilot to fine-tune stick response in the control to match what they feel when they are in other modes such as Stabilize, AltHold, PosHold, etc. The default value of 0 applies 30% expo to Roll and Pitch demands from the pilot.
3.6.3 Altitude Hold Mode
In altitude hold mode, Copter maintains a consistent altitude while allowing roll, pitch, and yaw to be controlled normally. This page contains important information about using and tuning AltHold.
Automatic altitude hold is a feature of many other flight modes (, , etc.) so the information here pertains to those modes as well.
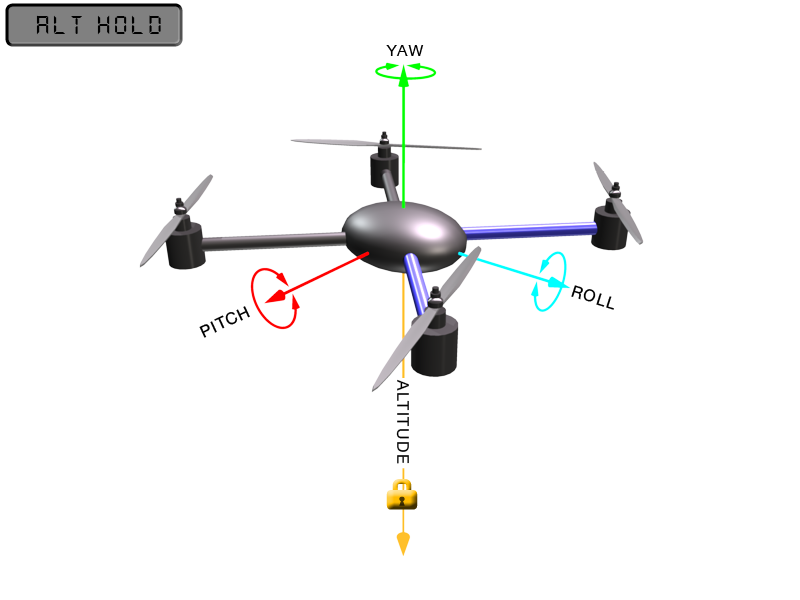
Note: The flight controller uses a barometer which measures air pressure as the primary means for determining altitude (“Pressure Altitude”) and if the air pressure is changing in your flight area due to extreme weather, the copter will follow the air pressure change rather than actual altitude. When fitted and enabled, a downward facing rangefinder such as LiDAR or SONAR will automatically provide even more accurate altitude maintenance, up to the limit of the sensor.
How to control
The pilot can control the climb or descent rate of the vehicle with the throttle stick. If the throttle stick is in the middle (40% ~ 60%) the vehicle will maintain the current altitude. Outside of the mid-throttle dead zone (i.e. below 40% or above 60%) the vehicle will descend or climb depending upon the deflection of the stick. When the stick is completely down the copter will descend at 2.5m/s and if at the very top it will climb by 2.5m/s. These speeds can be adjusted with the PILOT_VELZ_MAX parameter.
The size of the deadband can be adjusted with the THR_DZ parameter (AC3.2 and higher only). This params value should be between “0” and “400” with “0” meaning no deadband. “100” would produce a deadband 10% above and below mid throttle (i.e. deadband extends from 40% to 60% throttle stick position).
AC3.1 and later allow arming and disarming in altitude hold mode. When disarming, the copter may need to rest in the landing position for a few seconds to allow the “landing checker” to verify that the copter has landed before you are able to disarm.
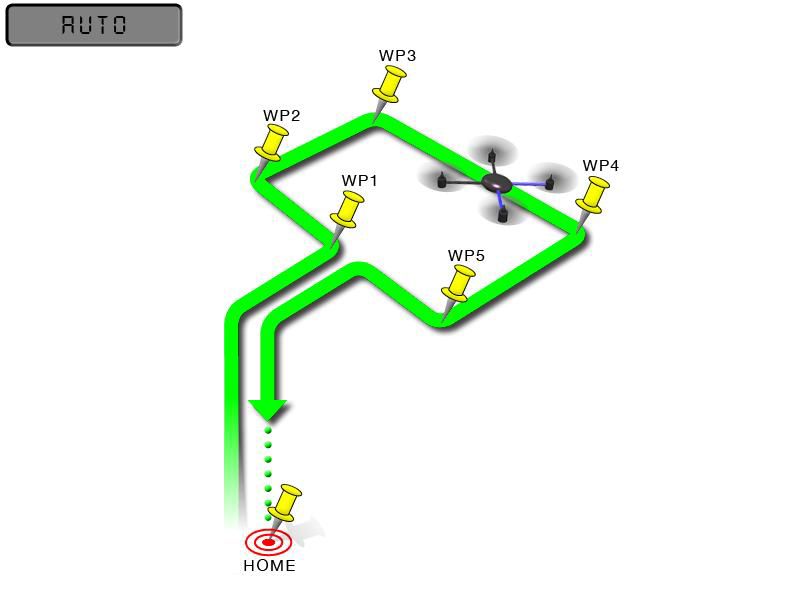
3.6.4 Auto Mode
In Auto mode the copter will follow a pre-programmed mission script stored in the autopilot which is made up of navigation commands (i.e. way points) and “do” commands (i.e. commands that do not affect the location of the copter including triggering a camera shutter).
AUTO mode incorporates the altitude control from and position control from and should not be attempted before these modes are flying well. All the same requirements apply including ensuring that vibration levels and compass interference levels are acceptable and that the GPS is functioning well including returning an HDOP of under 2.0.
AUTO should be set-up as one of the on the flight mode switch.
Make sure that the GPS is positioning first:
The LED of Mini Pix is green.
The LED of GPS and compass module is blinking.
If starting the mission while the copter is on the ground the pilot should ensure the throttle is down, then switch to the Auto flight mode, then raise the throttle. The moment that the throttle is raised above zero, the copter will begin the mission.
If starting the mission from the air the mission will begin from the first command the moment that the flight mode switch is moved to Auto. If the first command in the mission is a take-off command but the vehicle is already above the take-off command’s altitude the take-off command will be considered completed and the vehicle will move onto the next waypoint.
At any time, the pilot can retake control from the autopilot by returning the flight mode switch to another flight mode such as Stabilize or Loiter. If the pilot then switches to AUTO again, the mission will restart from the first command.
During the mission the pilot’s roll, pitch and throttle inputs are ignored but the yaw can be overridden with the yaw stick. This allows the pilot to for example aim the nose of the copter (which might have a hard-mounted
camera on it) as the copter flies the mission. The autopilot will attempt to retake yaw control as the vehicle passes the next waypoint.
Ending a mission
Missions should normally have an RTL as their final command to ensure the copter will return after the mission completes. Alternatively, the final command could be a LAND with a different location. Without a final RTL or LAND command the copter will simply stop at the final waypoint and the pilot will need to retake control with the transmitter.
Remember that when using RTL, the copter will return to the “home” position which is the location where the copter was armed.
As the copter touches down at the end of the mission the pilot should move the throttle to zero at which point the autopilot will disarm the motors if it also believes that it has landed.
3.6.5 PosHold Mode
The PosHold flight mode (previously known as “Hybrid”) is a new mode for AC3.2. It is similar to Loiter in that the vehicle maintains a constant location, heading, and altitude but is generally more popular because the pilot stick inputs directly control the vehicle’s lean angle providing a more “natural” feel.
When switched on, PosHold mode will automatically attempts to maintain the current location, heading and altitude. Good GPS position, and are all important in achieving good loiter performance.
How to control
The pilot can control the copter’s location horizontally and vertically with the control sticks.
Horizontal location can be adjusted with the Roll and Pitch control sticks with the default maximum lean angle being 45 degrees (angle can be adjusted with the ANGLE_MAX parameter). When the pilot releases the sticks, the copter will lean back to bring the vehicle to a stop.
Altitude can be controlled with the Throttle control stick just as in
The heading can be set with the Yaw control stick
You may arm in PosHold mode but only once the GPS has 3D lock and the HDOP has dropped to 2.0 or lower.
The HDOP value can be made clearly visible through the mission planner’s Quick screen by double clicking and then selecting “gpshdop” from the large grid of checkboxes.
The maximum brake-angle can be set with the PHLD_BRAKE_ANGLE parameter (i.e. 3000 = the vehicle will lean back up to 30degrees).
The speed the vehicle rotates back to the maximum angle can be set with the PHLD_BRAKE_RATE parameter (i.e. 8 = rotates back at 8 degrees per second)).
3.6.6 RTL Mode
This very simple flight mode simply stops the vehicle as soon as possible using the Loiter controller. Once invoked, this mode does not accept any input from the pilot. This mode requires GPS.
RTL mode (Return to Launch mode) navigates Copter from its current position to hover above the home position. The behavior of RTL mode can be controlled by several adjustable parameters.
When RTL mode is selected, the copter will return to the home location. The copter will first rise to before returning home or maintain the current altitude if the current altitude is higher than . The default value for is 15m.
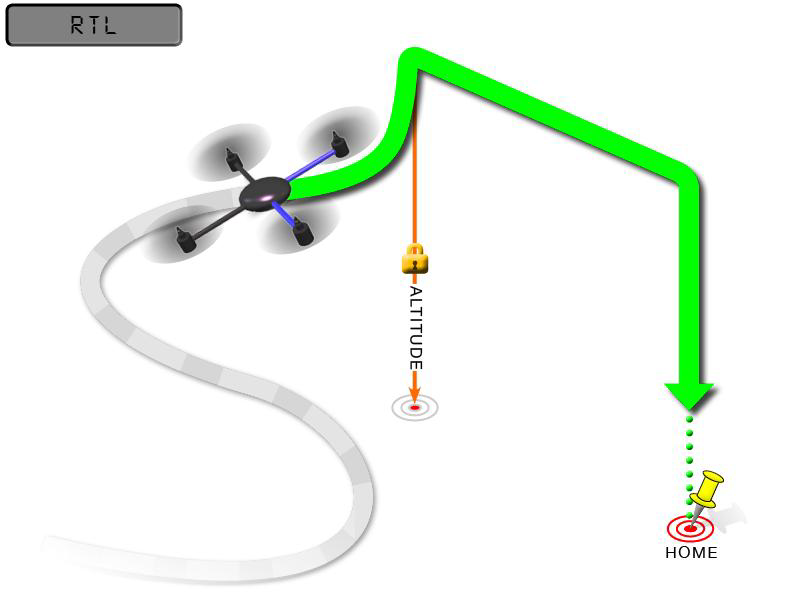
RTL is a GPS-dependent move, so it is essential that GPS lock is acquired before attempting to use this mode. Before arming, ensure that the APM’s blue LED is solid and not blinking. For a GPS without compass, the LED will be solid blue when GPS lock is acquired. For the GPS+Compass module, the LED will be blinking blue when GPS is locked.
RTL will command the copter to return to the home position, meaning that it will return to the location where it was armed. Therefore, the home position is always supposed to be your copter’s actual GPS takeoff location, unobstructed and away from people. For Copter if you get GPS lock and then ARM your copter, the home position is the location the copter was in when it was armed. This means if you execute an RTL in Copter, it will return to the location where it was armed.
In RTL mode the flight controller uses a barometer which measures air pressure as the primary means for determining altitude (“Pressure Altitude”) and if the air pressure is changing in your flight area, the copter will follow the air pressure change rather than actual altitude (unless you are within 20 feet of the ground and have SONAR installed and enabled).
Options (User Adjustable Parameters)
1. : The minimum altitude the copter will move to before returning to launch.
(1) Set to zero to return at the current altitude.
(2) The return altitude can be set from 1 to 8000 centimeters.
(3) The default return altitude Default is 15 meters (1500)
2. : The altitude the copter will move to at the final stage of “Returning to Launch” or after completing a Mission.
(1) Set to zero to automatically land the copter.
(2) The final return altitude may be adjusted from 0 to 1000 centimeters.
3. : Time in milliseconds to hover/pause above the “Home” position before beginning final descent.
The “Loiter” time may be adjusted from 0 to 60,000 milliseconds.
4. : Sets how the autopilot controls the “Yaw” during Missions and RTL.
(1) 0 = Never change Yaw.
(2) 1 = Face Next Waypoint including facing home during RTL.
(3) 2 = Face Next Waypoint except for RTL (i.e. during RTL vehicle will remain pointed at its last heading)
5. : The descent speed for the final stage of landing in centimeters per second.
The landing speed is adjustable from 20 to 200 centimeters per second.
6. : The vehicle will climb at least these many meters at the first stage of the RTL. By default, this value is zero. (only Copter-3.3 and above)
7. : The horizontal speed (in cm/s) at which the vehicle will return to home. By default, this value is zero meaning it will use . (Only Copter-3.4 and higher)
8. : Defines the slope of an inverted cone above home which is used to limit the amount the vehicle climbs when RTL-ing from close to home. Low values lead to a wide cone meaning the vehicle will climb less, High values will lead to the vehicle climbing more. (Supported in Copter-3.4 and higher)
Notes
1. Other navigation settings also have an influence over RTL mode:
(1)
(2)
(3)
2. To use RTL, GPS lock needs to be achieved (Blue GPS LED and Blue APM LED on solid not blinking) before arming and takeoff to establish the home or launch position.
3. Landing and re-arming the copter will reset home, which is a great feature for flying at airfields.
4. If you get lock for the first time while flying, your home will be set at the location of lock.
5. If you set the RTL_ALT to a number at other than 0 it will go to and maintain that altitude while returning.
6. RTL uses to determine how fast it travels.
7. Once the copter arrives at the home location the copter will pause for RTL_LOIT_TIME milliseconds, timeout (AUTO_LAND), then land.
3.6.7 Simple and Super Simple Modes
“Simple” and “Super Simple” modes allow the pilot to control the movement of the copter from the pilot’s point of view regardless of which way the copter is facing. This is useful for new pilots who have not mastered adjusting their roll and pitch inputs depending upon which way the vehicle is facing and for cases when the copter is far enough away that its heading is not apparent.
(1) “Simple” and “Super Simple” modes can be used in combination with nearly all flight modes except the Acro and Drift (in these flight modes the setting is ignored).
(2) Simple Mode allows you to control the copter relative to the copters heading at takeoff and relies only on a good compass heading.
(3) Super Simple Mode allows you to control the copter relative to its direction from home (i.e. where it was armed) but requires a good GPS position.
(4) Either mode can be assigned to a particular flight mode switch position or can be enabled/disabled from the .
Normal Mode
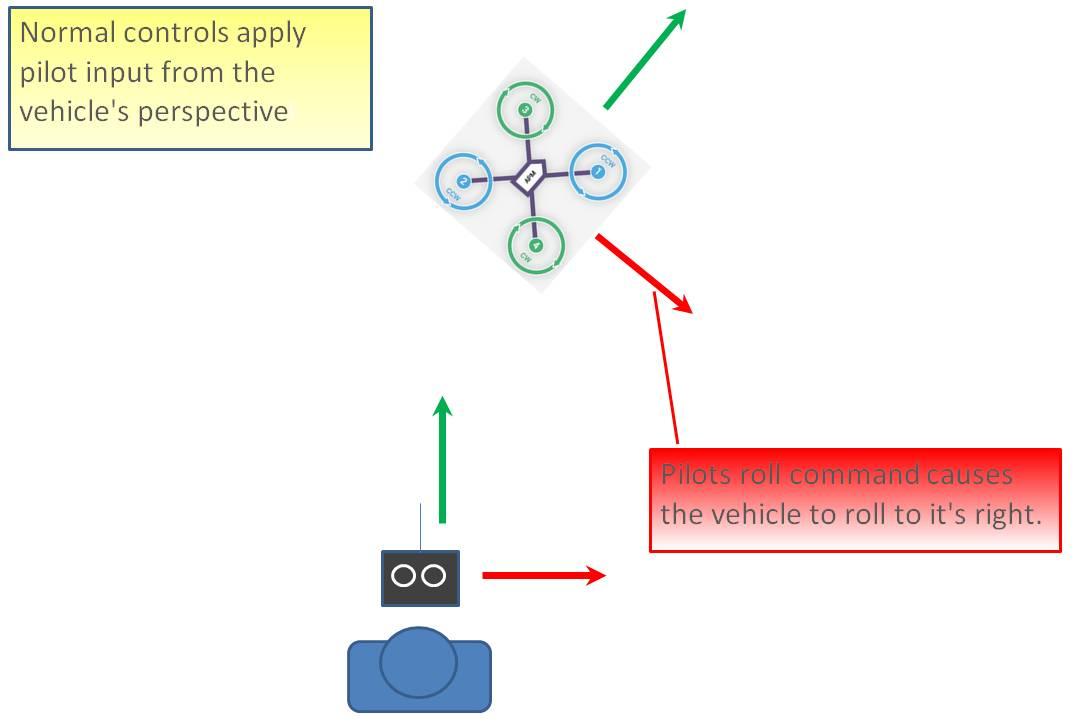
Without Simple or Super Simple enabled, the pilot’s transmitter stick inputs are applied in the orientation of the copter. For example, in the diagram above when the pilot applies roll input right (red) the vehicle rolls to its right.
With the copter is facing in the same direction as the pilot, it is relatively easy to control the vehicle but when the vehicle is facing towards the pilot an inexperienced pilot will feel that the controls are all reversed. I.e. if the pilot inputs right roll, the vehicle will move to the left from the pilot’s point of view.
Simple Modes
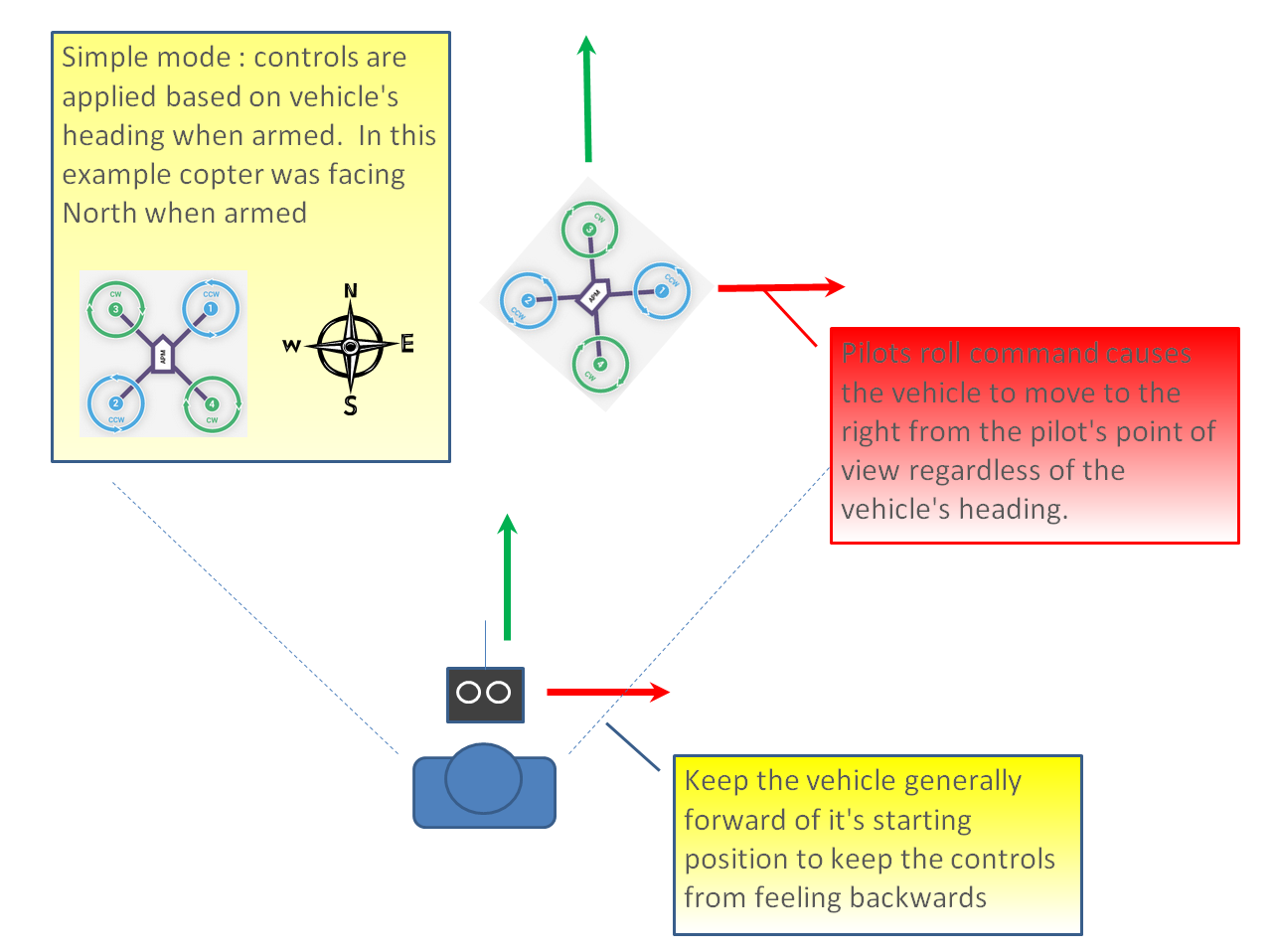
Similar to the “care free” mode on other systems, this mode allows you to fly your copter as though it were pointed in the direction it was pointed when it was armed regardless of its current heading orientation. So, if you hold the pitch stick forward the copter will fly away from you, pull the pitch stick back and it will come back towards home. You can even apply yaw to spin the copter in any direction but the movement of the copter’s position relative to the stick inputs will behave exactly as it did at takeoff.
Generally, when arming you should stand behind the vehicle with its nose pointing directly away from you. While flying you should try to keep the vehicle flying in front of its starting position because if it flies behind you all the controls will feel reversed.
As mentioned above simple mode is also very useful in emergency situations where the copter is far enough away that it is very difficult to determine its heading.
Super Simple Modes
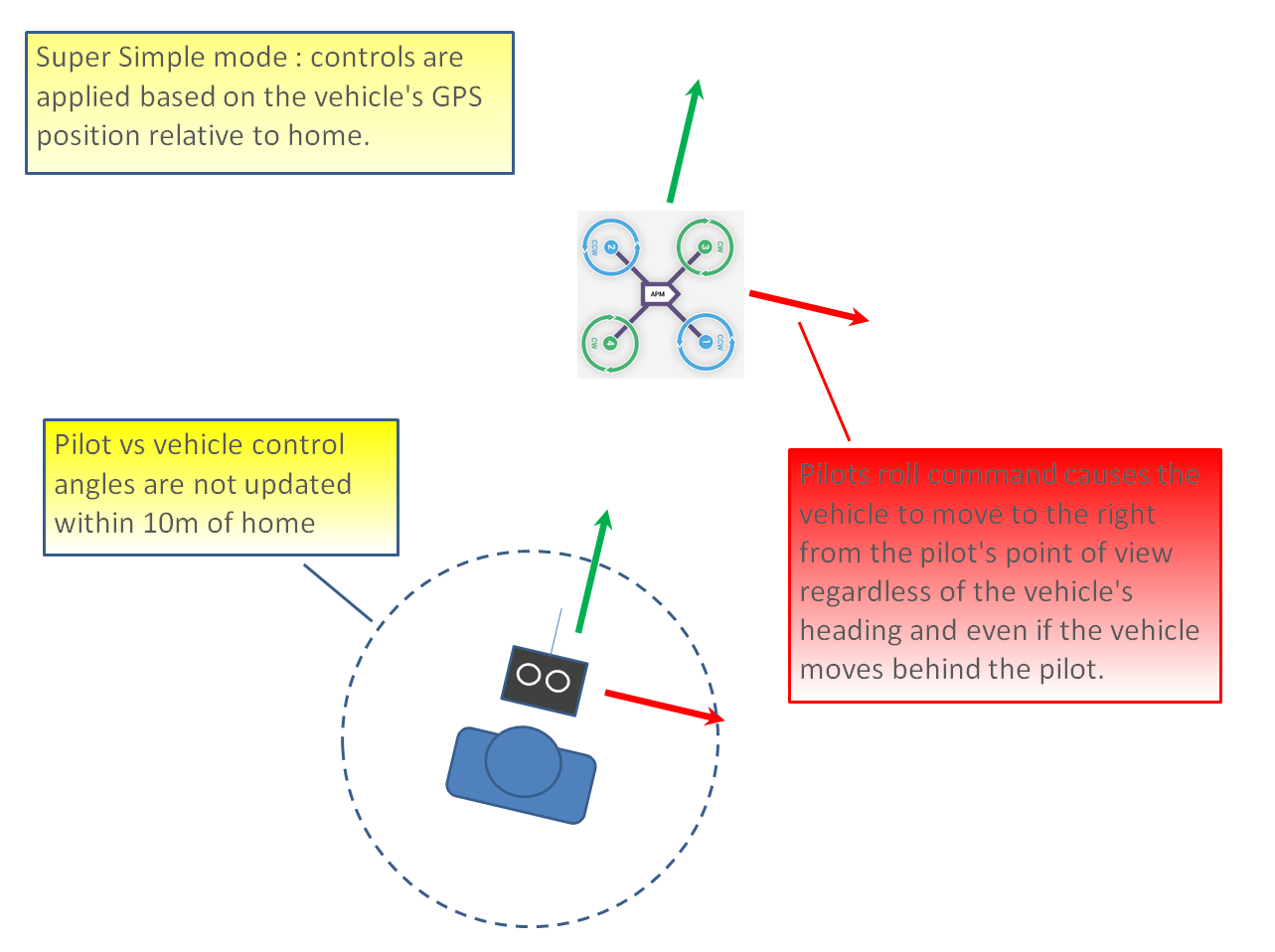
Super Simple mode is the same as simple mode except that it uses the vehicle’s position relative to home instead of the vehicle’s initial heading when it was armed. This means that no matter where the vehicle is, pulling the pitch back will cause it to return towards home regardless of the vehicle’s actual heading.
The advantage over simple mode is that the controls are applied from the pilot’s point of view even when the copter flies behind the pilot/home location.
If the pilot holds full right roll the vehicle will fly a circle clockwise around the pilot (although the circle’s radius may tend to grow slightly with each orbit due to “lag”).
The disadvantage is that mode require a GPS lock because so you should ensure you have GPS lock before take-off.
The orientation is not updated when the vehicle is within 10m of home meaning close fly-bys of the home location should be avoided.
To ensure the controls are correct right at take-off, as with simple mode, you should arm with the pilot standing behind the vehicle and with both pilot and vehicle pointing in the same direction.
3.6.8 More flight modes
Guided Mode: Guided mode is a capability of Copter to dynamically guide the copter to a target location wirelessly using a telemetry radio module and ground station application. This page provides instructions for using guided mode.
Loiter Mode: Loiter Mode automatically attempts to maintain the current location, heading and altitude. The pilot may fly the copter in Loiter mode as if it were in a more manual flight mode but when the sticks are released, the vehicle will slow to a stop and hold position.
Circle Mode: Circle will orbit a point located CIRCLE_RADIUS centimeters in front of the vehicle with the nose of the vehicle pointed at the center.
Drift Mode: This page provides tips for flying in Drift Mode and methods for tuning your copter to fly optimally in Drift Mode.
Sport Mode: Sport Mode is also known as “rate controlled stabilize” plus Altitude Hold.
Flip Mode: Vehicle will flip on its roll or pitch axis depending upon the pilot’s roll and pitch stick position. Vehicle will rise for 1 second and then rapidly flip. The vehicle will not flip again until the switch is brought low and back to high. Give yourself at least 10m of altitude before trying flip for the first time!
AutoTune: AutoTune attempts to automatically tune the Stabilize P, Rate P and D, and maximum rotational accelerations to provide the highest response without significant overshoot. Copter needs to be “basically” flyable in before attempting to use AutoTune as the feature needs to be able to “twitch” the copter in the roll and pitch axis.
Land Mode: LAND Mode attempts to bring the copter straight down
Break Mode: This very simple flight mode simply stops the vehicle as soon as possible using the Loiter controller. Once invoked, this mode does not accept any input from the pilot. This mode requires GPS.
Throw Mode: This slightly dangerous flight mode allows the pilot to throw the vehicle into the air (or drop the vehicle) in order to start the motors. Once in the air, this mode does not accept any input from the pilot. This mode requires GPS.
Avoid_ADSB: for ADS-B based avoidance of manned aircraft. Should not be set-up as a pilot selectable flight mode.
Guided_NoGPS: which is meant for developer use only.
The details introduction about flight modes can check on website here:
4. F/S(failsafe) Setting
4.1 Radio Failsafe Setup
Mini Pix supports Return-To-Launch in cases where contact between the Pilot’s RC transmitter and the flight controller’s receiver is lost. This page explains this failsafe’s setup and testing. Note the “Radio failsafe” was previously called “Throttle failsafe” because of the way in which some receivers use the throttle channel to signal the loss of contact.

Make sure transmitter and receiver connect success and work with SBUS signal.
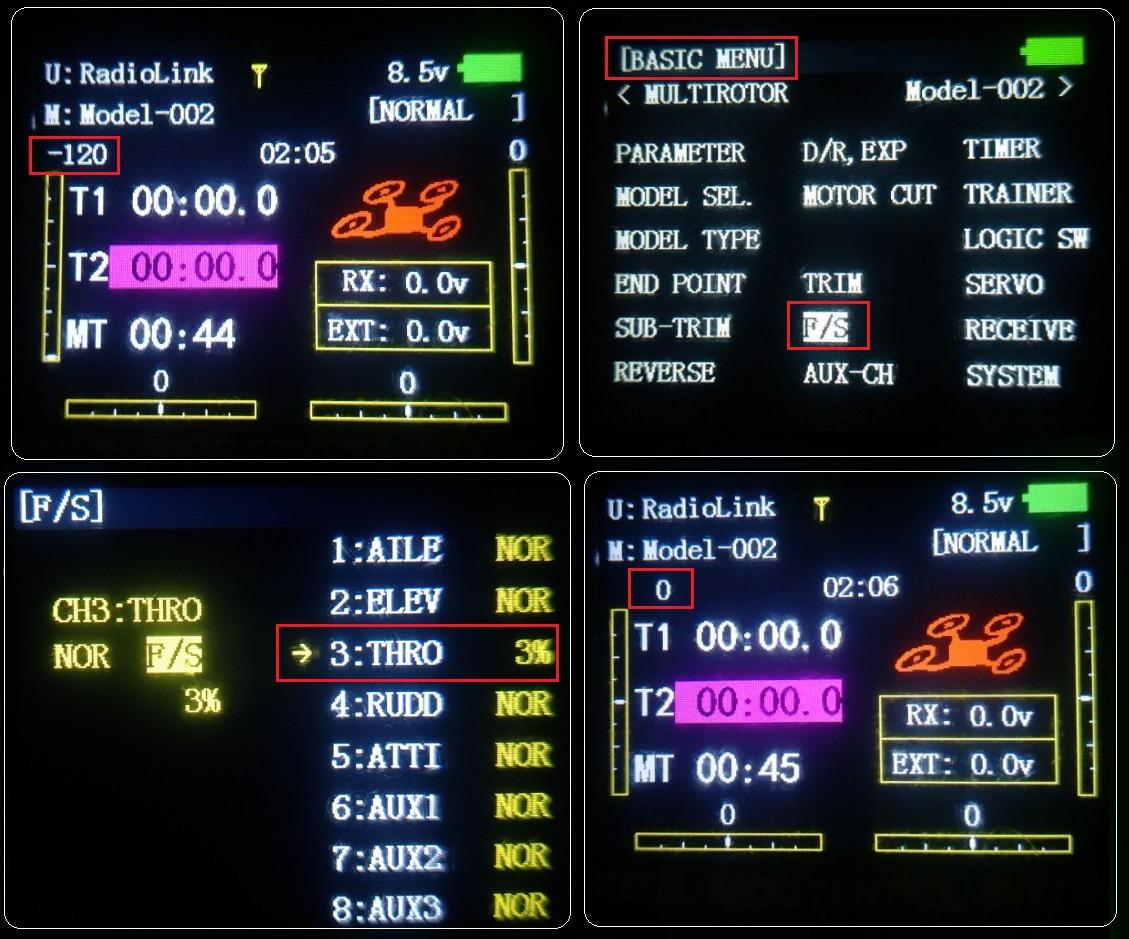
F/S setting steps:
Setup in transmitter: setup the throttle trim to -120 by trim switch and then press Mode button one second into BASIC MENU, choose and into F/S menu, put the throttle stick to the bottom to setup 3: THRO 3%. Please setup the throttle trim back to 0 after setup the THRO 3% success.
Receiver and flight controller MINI PIX setup:
By default, a newly purchased receiver will be set-up to simply hold all channels at their last known position when the receiver and transmitter lose contact. This is not good because the flight controller has no way to know that the Pilot has lost control of the vehicle. Instead the receiver must be set-up to signal to the flight controller it has lost contact and there are two ways that it can do this (the method depends upon the receiver):
“Low-Throttle” method - the receiver pulls the throttle channel (normally channel 3) to a value below the bottom of its normal range (normally below 975).
With the LiPo battery disconnected:
1. Connect your flight controller to the mission planner and select Initial Setup >> Mandatory Hardware >> Failsafe.
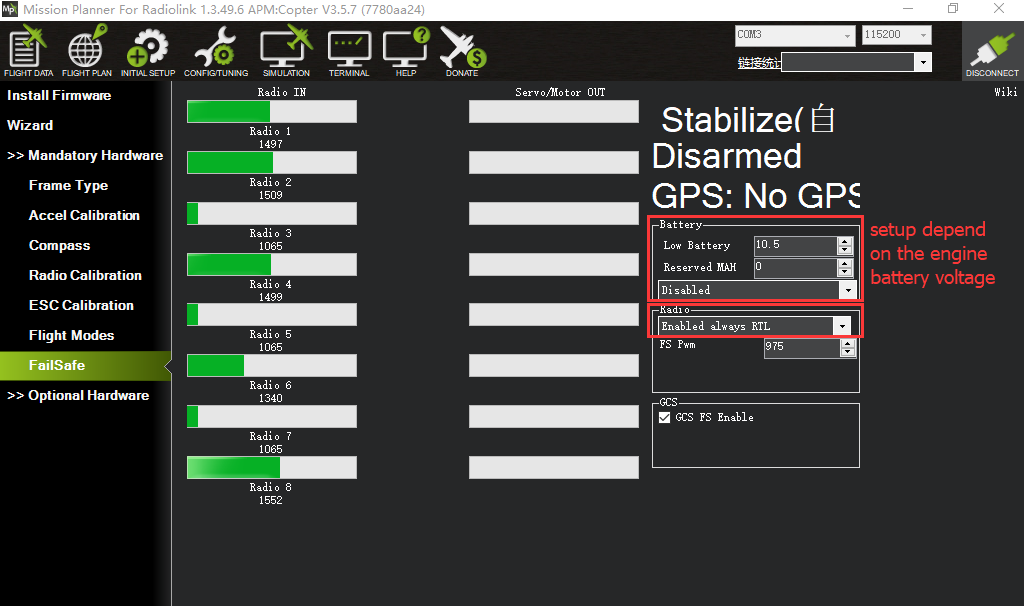
2. Set the Failsafe Options to one of the three options:
(1) “Enabled always RTL” to force the vehicle to always RTL even if flying a mission in AUTO mode.
(2) “Enabled Continue with Mission in AUTO” to allow the vehicle to continue with missions even if it takes the vehicle outside of RC range (not recommended). In all other cases the vehicle will RTL.
(3) “Enable always LAND” to force the vehicle to Land immediately if it loses RC contact.
Set the “FS PWM” value to be:
(1) at least 10 PWM higher than your Channel 3’s PWM value when the throttle stick is fully down and the transmitter is off.
(2) at least 10 lower than your channel 3’s PWM value when the throttle stick is fully down and the transmitter is on.
(3) above 910.
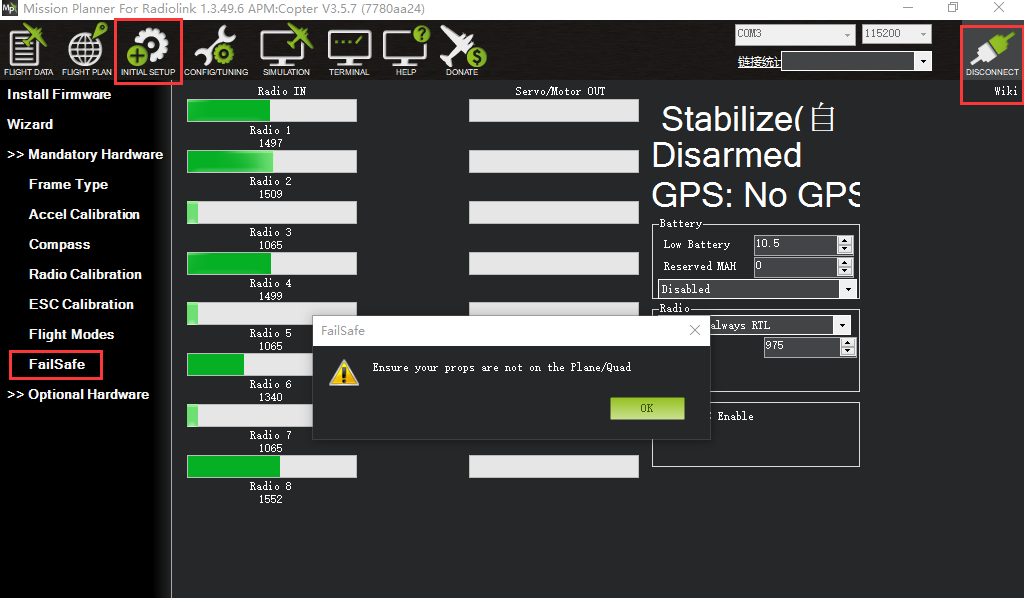
Click OK to into the failsafe setting menu.
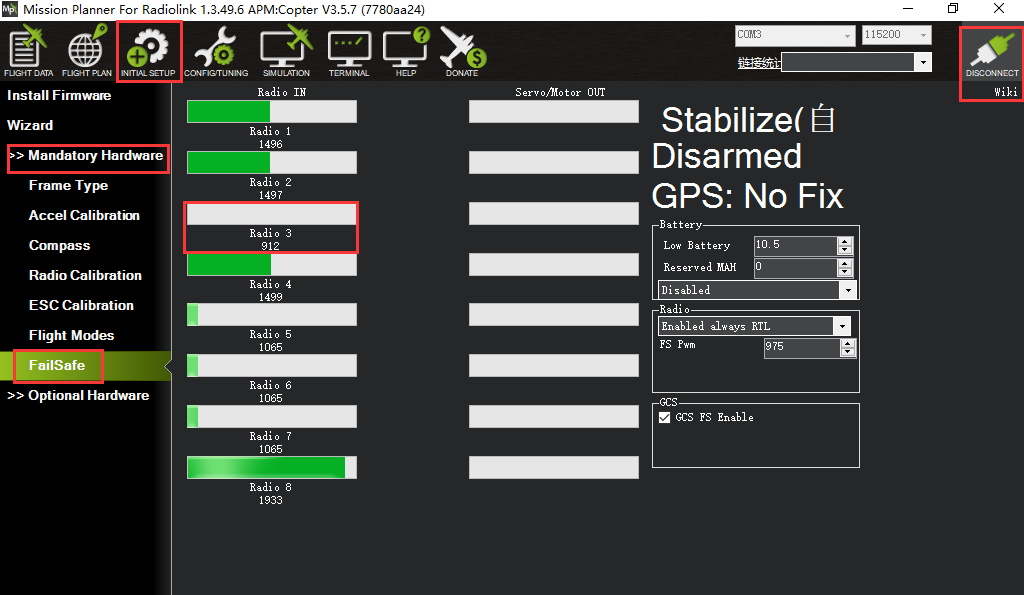
You can turn off transmitter to check if the Failsafe function setup success(the PWM of CH3 is smaller than 975)
If enabled and set-up correctly the radio Failsafe will trigger if:
(1) The pilot turns off the RC transmitter.
(2) The vehicle travels outside of RC range.
(3) The receiver loses power (unlikely).
(4) The wires connecting the receiver to the flight controller are broken (unlikely).
When a radio Failsafe is triggered one of the following will happen:
(1) Nothing if the vehicle is already disarmed.
(2) Motors will be immediately disarmed if the vehicle is landed OR in stabilize or acro mode and the pilot’s throttle is at zero.
(3) Return-to-Launch (RTL) if the vehicle has a GPS lock and is more than 2 meters from the home position.
(4) LAND if the vehicle has:
no GPS lock OR
is within 2 meters of home OR
the FS_THR_ENABLE parameter is set to “Enabled Always Land”
If the Failsafe clears (i.e. transmitter and receiver regain contact) the copter will remain in its current flight mode. It will not automatically return to the flight mode that was active before the Failsafe was triggered. This means that if, for example, the vehicle was in Loiter when the Failsafe occurred and the flight mode was automatically changed to RTL, even after the transmitter and receiver regained contact, the vehicle would remain in RTL. If the pilot wished to re-take control in Loiter he/she would need to change your flight mode switch to another position and then back to Loiter.
Copter also supports , and .
You can check your Failsafe by performing the following tests with the MINI PIX connected to the Mission Planner either via a USB cable or telemetry link. You can complete these tests without plugging in your LiPo battery but if you do connect a battery you should first remove the propellers.
Test #1: if using the “Low-Throttle” method, ensure the throttle channel drops with loss of radio contact
Ensure your RC transmitter is on and connected with the throttle all the way down and flight mode set to Stabilize
The throttle (channel 3) PWM value should be approximately as in first illustration below. Its value may be higher or lower but it should definitely be at least 10 higher than the value held in the FS PWM field
Turn the transmitter off and the throttle PWM value should drop to be at least 10 below the FS PWM field value (as in the second illustration below) below
Test #2: ensuring motors disarm if in stabilize or acro with throttle at zero
Switch to stabilize mode, arm your motors but keep your throttle at zero. Turn off your transmitter. The motors should disarm immediately (red led will start flashing, DISARMED will be displayed in the Mission Planner’s Flight Data screen).
Test #3: ensuring flight mode changes to RTL or LAND when throttle is above zero
Switch to stabilize mode, arm your motors and raise your throttle to the midpoint. Turn off your transmitter. The Flight Mode should switch to RTL if you have a GPS lock or LAND if you do not have a GPS lock (the flight mode and GPS lock status are visible in the Mission Planner’s flight data screen).
Test #4: retaking control after the failsafe has cleared
continuing on from test #3, turn your transmitter back on
while the flight mode is still in RTL or LAND and armed, change the flight mode switch to another position and then back to stabilize mode. Ensure that the flight mode displayed on the Failsafe page is updating appropriately.
Test #5 (optional): removing power from the receiver
Switch to stabilize mode, arm your motors and keep your throttle above zero.
Carefully disconnect the power wires connecting the receiver to the APM
The Flight Mode should switch to RTL or LAND as described in Test #3
Warning: unplug the APM so that it is powered down before reattaching the receiver’s power
4.2 EKF FailSafe
FS_EKF_ACTION
Note: This parameter is for advanced users
Controls the action that will be taken when an EKF failsafe is invoked
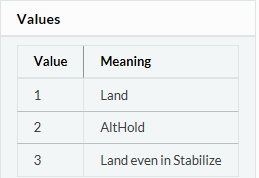
It defaults the value 1, that is the drone will land if lose signal, but you can change the setting from value 1 to value 2, which means the drone will AltHold if lose signal.
FS_EKF_THRESH
Note: This parameter is for advanced users
Allows setting the maximum acceptable compass and velocity variance
5. Optional hardware setup
Prepare a drone first, a X frame quadcopter as a sample, please mount a MINI PIX as below steps after you have assembled the drone.
1. mount a MINI PIX on the center position of the drone, and make sure that the MINI PIX is horizontal on the drone.
2. connect the Mission Planner after download the firmware, calibrate and setup parameters as the steps above.
3. press the safety switch and have a try to disarmed, mount on the propellers if the drone can disarm success, then you can go to flight.
5.1 Install Mini Pix on aircraft
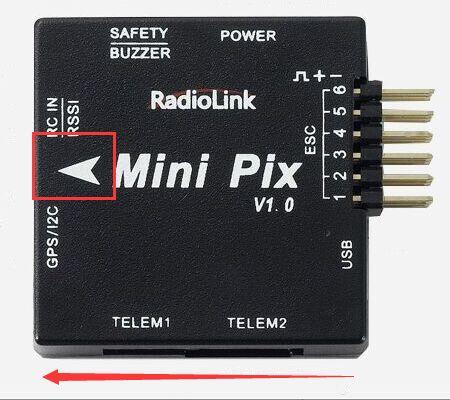
Mount the Mini Pix at the barycenter of the drone, make sure the arrow of the MINI PIX is point to the front.
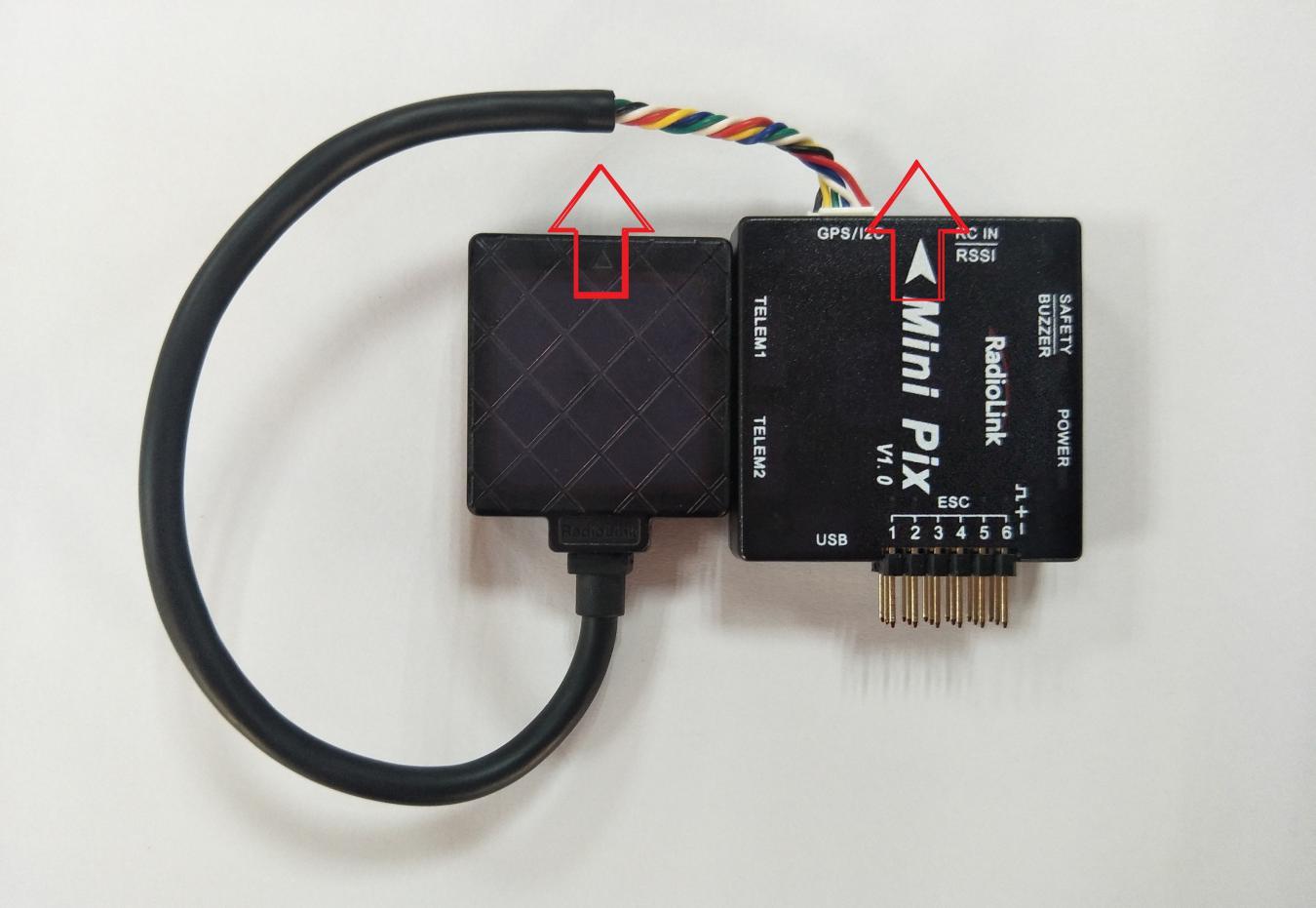
Keep the GPS with the same direction of MINI PIX if you need to use MINI PIX with GPS.
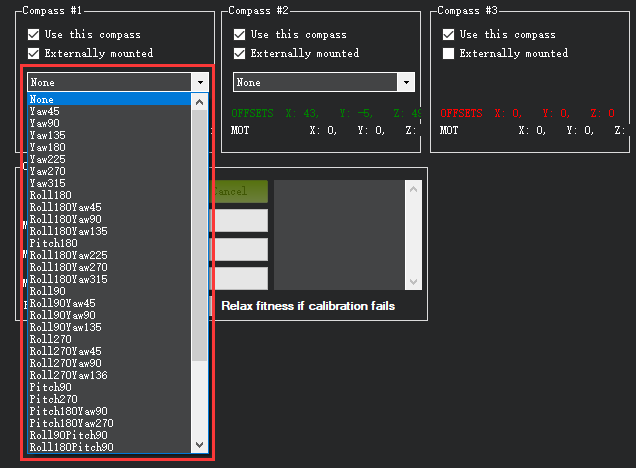
If the installation can’t be done with the default direction, parameters need to be setup according to the installation direction.
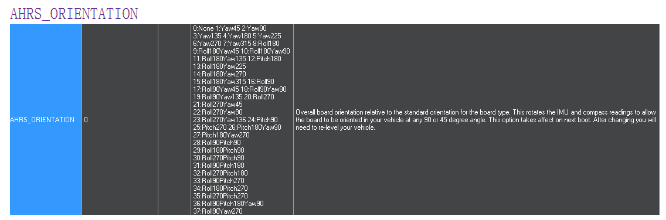 Set the rotation direction and degree and the corresponding values basing on the variation of the flight controller and the aircraft vehicle and input to save. Restart and test if the movements of the flight controller are correct at the homepage of Mission Planner.
Set the rotation direction and degree and the corresponding values basing on the variation of the flight controller and the aircraft vehicle and input to save. Restart and test if the movements of the flight controller are correct at the homepage of Mission Planner.
5.2 Connect Mini Pix to the aircraft
5.2.1 Motor order rotation select
Green means CW Blue means CCW

Legend for motor-order diagrams
Quadcopters
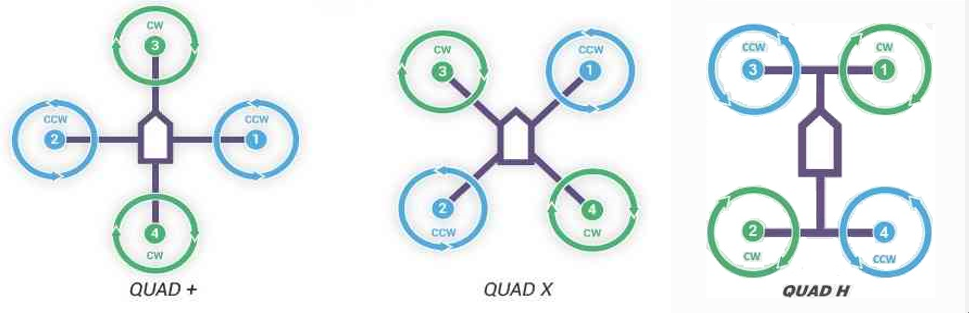
Hexacopter

Octocopter

Y6
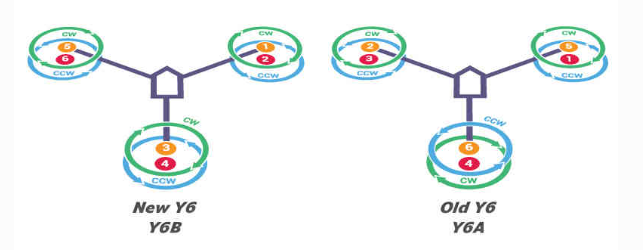
X8
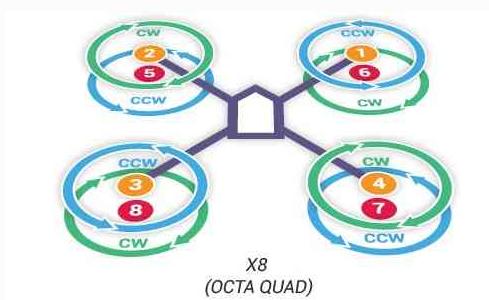
Tricopter
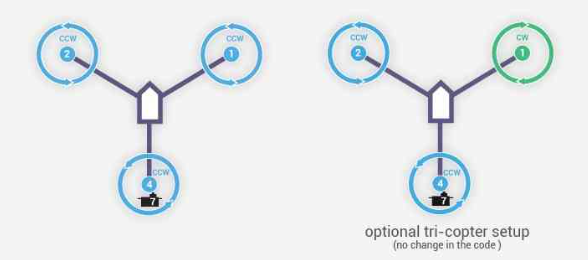
Note Since there’s no voltage output from the flight controller, an extra BEC module needs to be connected to power supply servo for this model frame
5.2.2 How to recognizing clockwise and counterclockwise propellers
 The diagrams above show two types of propellers: clockwise (called pushers) and counterclockwise (called pullers). Pusher propellers are often marked with a P. However not all propellers are marked and both types are often available in either rotational direction. Therefore, it is most reliable to recognize the correct propeller type by its shape as shown below. Note that the propellers below have the edge with the shallow consistent curve at the leading edge in direction of rotation and the more radical scalloped (and usually thinner edge) as the trailing edge. You can use these features to recognize propellers of the correct direction of rotation.
The diagrams above show two types of propellers: clockwise (called pushers) and counterclockwise (called pullers). Pusher propellers are often marked with a P. However not all propellers are marked and both types are often available in either rotational direction. Therefore, it is most reliable to recognize the correct propeller type by its shape as shown below. Note that the propellers below have the edge with the shallow consistent curve at the leading edge in direction of rotation and the more radical scalloped (and usually thinner edge) as the trailing edge. You can use these features to recognize propellers of the correct direction of rotation.
5.2.3 Connect the Spare Parts
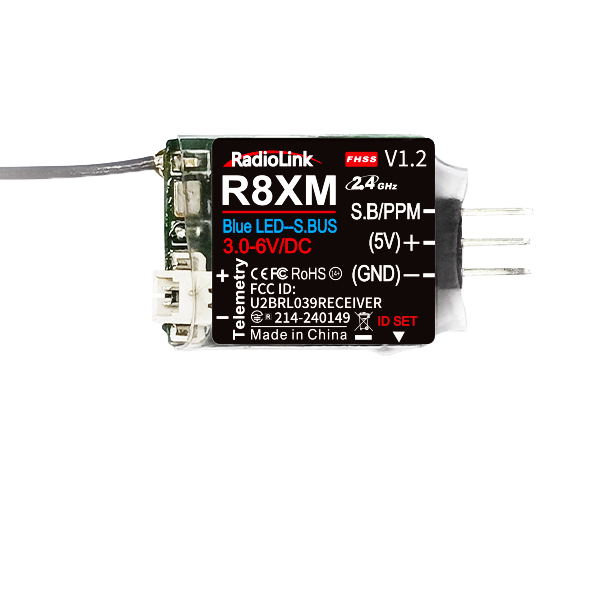
Receiver: use a 3-pin connect wire to connect the receiver SBUS signal output port to the RC IN port of MINI PIX.
Buzzer and safety switch: use a 5-pin GH connect wire to connect Safety Switch and Buzzer to the SAFETY/BUZZER port to MINI PIX.
Power Module: use a 6-pin GH wire to connect the power module to the POWER port of the MINI PIX.
GPS and compass: use a 6-pin GH wire to connect the GPS (TS100 for example) to the GPS/I2C port of the MINI PIX, please make sure that GPS keeps the same direction as MINI PIX.
Battery Monitors Setup
The battery monitor module provides a stable 5.37V and 2.25Amp power supply which reduces the chances of a brown-out.
Allows monitoring of the battery’s voltage and current and triggering a return-to-launch when the voltage becomes low or the total power consumed during the flight approaches the battery’s capacity.
Allows the autopilot firmware to more accurately compensate for the interference on the compass from other components.The 6-pin cable plugs into the 6-pin connector on both the Power Module and MINI Pix.
Mission Planner Setup
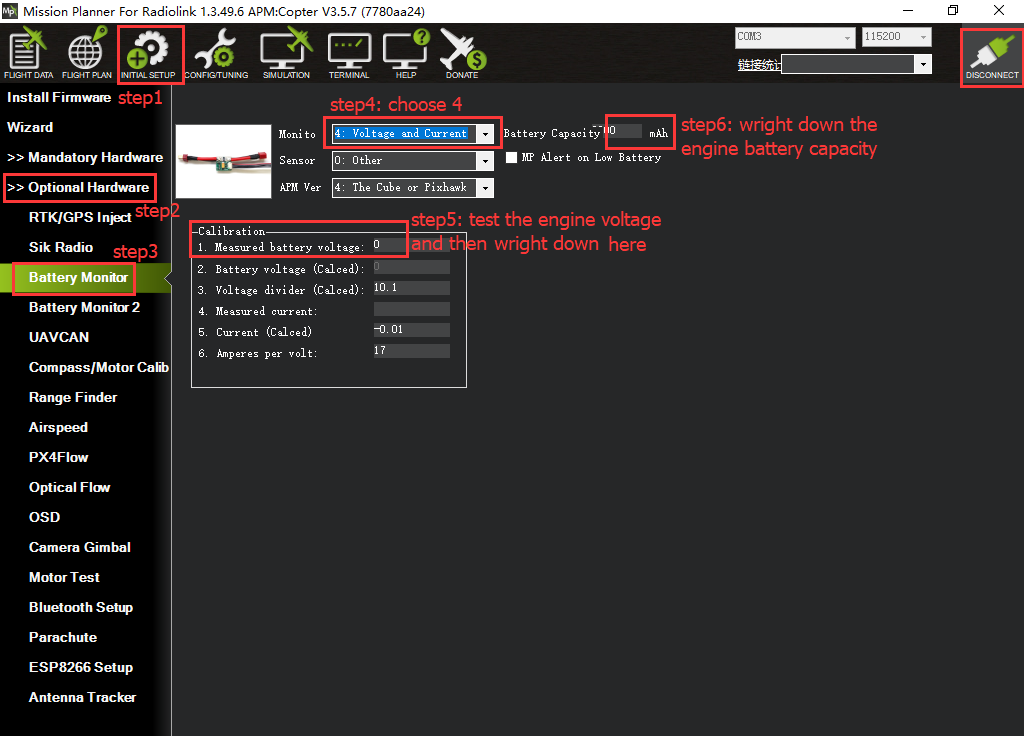
Battery measurement is primarily set up in the Mission Planner ‘s INITIAL SETUP -- Optional Hardware -- Battery Monitor screen.
Enter the properties your module can measure, the type of module, the type of flight controller, and the battery capacity:
Monitor: Voltage and Current or Battery Volts
Sensor: Supported power module, or “Other”
APM ver: Flight controller (e.g. Pixhawk )
Battery Capacity: Battery capacity in mAh
The bottom section of the the Battery Monitor screen allows you to calibrate the voltage/current measurement in order to verify that the measured voltage of the battery is correct. You can also set the Sensor selection list to Other and use the calibration process to configure an “unknown” power module.
To calibrate the voltage reading:
1. Check the voltage of your LiPo battery with a hand-held volt meter or a
2. Connect your MINI PIX to your computer and plug in the LiPo battery
3. Check the voltage through the Mission Planner ‘s INITIAL SETUP | Optional Hardware | Battery Monitor screen or on the Flight Data screen’s HUD or Status tab.

If you find the voltage is not correct (i.e. if off from the hand-held volt meter’s reading by more than perhaps 0.2V) you can correct the APM/PX4’s reading by doing the following:
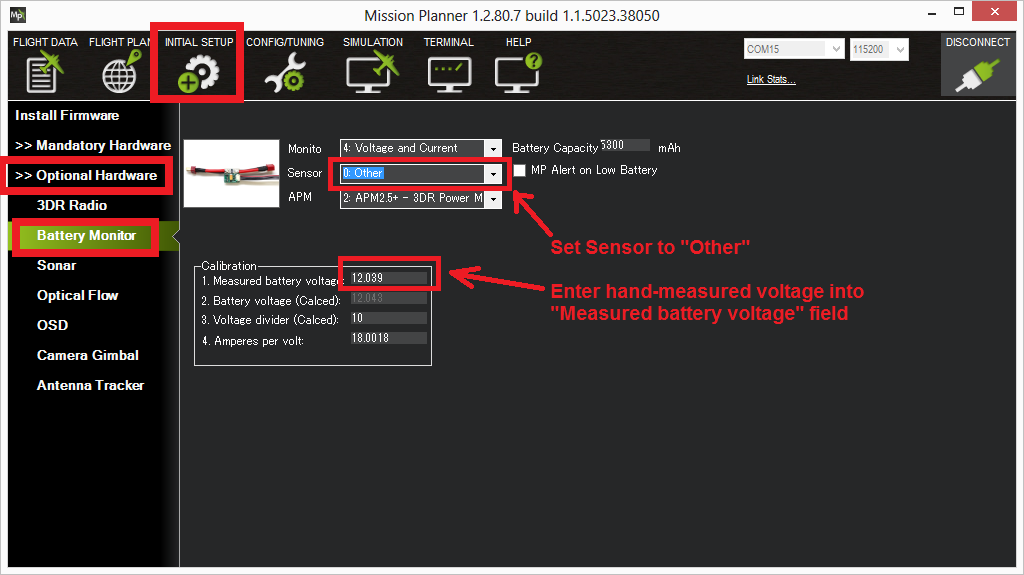
1. On Mission Planner ‘s INITIAL SETUP | Optional Hardware | Battery Monitor screen set the “Sensor” to “Other”.
2. Enter the voltage according to the hand-held volt meter in the “Measured Battery Voltage” field.
3. Press tab or click out of the field and the “Voltage Divider (Calced)” value will update and the “Battery voltage (Calced)” should now equal the measured voltage.
Using the power analyzer you can also measure the current and compare to results displayed in the Mission Planner.
5.3 LED Indicator, Arming and Troubleshooting
5.3.1 LED Indicator
Blue and red flashing: Initializing
Yellow flashing twice: Error, Arming rejected
Blue flashing: Stabilize, can be armed. Faile to RTL or PosHold
Green flashing: GPS locked, can be armed and take off, RTL
Green always on + a long D sound: Armed and ready to take off
Yellow flashing: Transmitter failsafe activated
Yellow flashing+repeated sounds: Battery failsafe activated
Yellow flashing+High/High/Low sounds: GPS data error or GPS failsafe activated
Safety button indicator
Continous flashing quickly: System auto checking
Flashing intervally: System is ready. Press the button to activate the system
Always on: Ready to be armed.
5.3.2 Arming and Disarming
Arming the motors causes ArduPilot to apply power to your motors, which will cause them to start spinning. Before arming the motors, make sure all people, objects, and any body parts (e.g., hands) are clear of the propellers. Then do the following:
You can only arm or disarm in Stabilize, ACRO, AltHold, Loiter, and PosHold modes. You cannot arm your copter in AUTO mode.
1. Turn on your transmitter.
2. Plug in your LiPo battery. The red and blue lights should flash for a few seconds as the gyros are calibrated (do not move the copter)
3. The pre-arm checks will run automatically and if any problems are found a MINI PIX will double blink the red arming light, on a Pixhawk the RGB led will blink yellow.
4. Check that your flight mode switch is set to Stabilize, ACRO, AltHold.
5. Press the safety button until the light goes solid.
6. If you are planning on using the autopilot (i.e. Loiter, RTL, Drift, Auto or Guided modes) you should wait for 30 seconds after the GPS has gotten 3d lock. This will give the GPS position time to settle. On a MINI PIX the RGB LED will blink green.
7. Arm the motors by holding the throttle down, and rudder right for 5 seconds. It takes approximately 5 seconds the first time the copter is armed as it re-initializes the gyros and barometer. Do not hold the rudder right for too long (>15 seconds) or you will begin the feature.
8. Once armed, the red arming light should go always-on and the propellers will begin to spin.
9. Raise the throttle to take-off.
If you leave the throttle at minimum for 15 seconds while in any of the above modes the motors will automatically disarm.
It means the drone have failed to disarmed when you heard a long sound like D~~~~.
You can connect the MINI PIX to computer and check the reason.
RC failures (i.e., transmitter/receiver failures):
RC not calibrated: the has not been performed. RC3_MIN and RC3_MAX must have been changed from their default values (1100 and 1900), and for channels 1 to 4, MIN value must be 1300 or less, and MAX value 1700 or more.
Barometer failures:
Baro not healthy: the barometer sensor is reporting that it is unhealthy which is normally a sign of a hardware failure.
Alt disparity: the barometer altitude disagrees with the inertial navigation (i.e. Baro + Accelerometer) altitude estimate by more than 2 meters. This message is normally short-lived and can occur when the flight controller is first plugged in or if it receives a hard jolt (i.e. dropped suddenly). If it does not clear the or there may be a barometer hardware issue.
Compass failures:
Compass not healthy: the compass sensor is reporting that it is unhealthy which is a sign of a hardware failure.
Compass not calibrated : the . the COMPASS_OFS_X, Y, Z parameters are zero or the number or type of compasses connected has been changed since the last compass calibration was performed.
Compass offsets too high: the primary compass’s offsets length (i.e. sqrt(x^2+y^2+z^2)) are larger than 500. This can be caused by metal objects being placed too close to the compass. If only an internal compass is being used (not recommended), it may simply be the metal in the board that is causing the large offsets and this may not actually be a problem in which case you may wish to disable the compass check.
Check mag field: the sensed magnetic field in the area is 35% higher or lower than the expected value. The expected length is 530 so it’s > 874 or < 185. Magnetic field strength varies around the world but these wide limits mean it’s more likely the has not calculated good offsets and should be repeated.
Compasses inconsistent: the internal and external compasses are pointing in different directions (off by >45 degrees). This is normally caused by the external compasses orientation (i.e. COMPASS_ORIENT parameter) being set incorrectly.
GPS related failures:
GPS Glitch : the and the vehicle is in a flight mode that requires GPS (i.e. Loiter, PosHold, etc) and/or the is enabled.
Need 3D Fix : the GPS does not have a 3D fix and the vehicle is in a flight mode that requires the GPS and/or the is enabled.
Bad Velocity: the vehicle’s velocity (according to inertial navigation system) is above 50cm/s. Issues that could lead to this include the vehicle actually moving or being dropped, bad accelerometer calibration, GPS updating at below the expected 5hz.
High GPS HDOP : the GPS’s HDOP value (a measure of the position accuracy) is above 2.0 and the vehicle is in a flight mode that requires GPS and/or the is enabled. This may be resolved by simply waiting a few minutes, moving to a location with a better view of the sky or checking sources of GPS interference (i.e. FPV equipment) are moved further from the GPS. Alternatively, the check can be relaxed by increasing the GPS_HDOP_GOOD parameter to 2.2 or 2.5. Worst case the pilot may disable the fence and take-off in a mode that does not require the GPS (i.e. Stabilize, AltHold) and switch into Loiter after arming but this is not recommended.
Note: the GPS HDOP can be readily viewed through the Mission Planner’s Quick tab as shown below.
INS checks (i.e. Accelerometer and Gyro checks):
INS not calibrated: some or all of the accelerometer’s offsets are zero. The .
Accels not healthy: one of the accelerometers is reporting it is not healthy which could be a hardware issue. This can also occur immediately after a firmware update before the board has been restarted.
Accels inconsistent: the accelerometers are reporting accelerations which are different by at least 1m/s/s. The or there is a hardware issue.
Gyros not healthy: one of the gyroscopes is reporting it is unhealthy which is likely a hardware issue. This can also occur immediately after a firmware update before the board has been restarted.
Gyro cal failed: the gyro calibration failed to capture offsets. This is most often caused by the vehicle being moved during the gyro calibration (when red and blue lights are flashing) in which case unplugging the battery and plugging it in again while being careful not to jostle the vehicle will likely resolve the issue. Sensors hardware failures (i.e. spikes) can also cause this failure.
Gyros inconsistent: two gyroscopes are reporting vehicle rotation rates that differ by more than 20deg/sec. This is likely a hardware failure or caused by a bad gyro calibration.
Board Voltage checks:
Check Board Voltage: the board’s internal voltage is below 4.3 Volts or above 5.8 Volts.
If powered through a USB cable (i.e. while on the bench) this can be caused by the desktop computer being unable to provide sufficient current to the flight controller - try replacing the USB cable.
If powered from a battery this is a serious problem and the power system (i.e. Power Module, battery, etc) should be carefully checked before flying.
Parameter checks:
Ch7&Ch8 Opt cannot be same: are set to the same option which is not permitted because it could lead to confusion.
Check FS_THR_VALUE: the has been set too close to the throttle channels (i.e. ch3) minimum.
Check ANGLE_MAX: the ANGLE_MAX parameter which controls the vehicle’s maximum lean angle has been set below 10 degrees (i.e. 1000) or above 80 degrees (i.e. 8000).
ACRO_BAL_ROLL/PITCH: the ACRO_BAL_ROLL parameter is higher than the Stabilize Roll P and/or ACRO_BAL_PITCH parameter is higher than the Stabilize Pitch P value. This could lead to the pilot being unable to control the lean angle in ACRO mode because the would overpower the pilot’s input.
Disabling the pre-arm safety check
If you are confident that the pre-arm check failure is not a real problem you can disable the checks by:
Connecting your Flight Controller to the Mission Planner
Go to Mission Planner’s Config/Tuning >> Standard Params screen
set the Arming Check drop-down to “Disabled” or one of the “Skip” options which more effectively skips the item causing the failure.
Push the “Write Params” button
Ideally however you should determine the cause of the pre-arm failure and if it can be resolved, return the Arming Check parameter back to “Enabled”.
Disarming the motors:
Disarming the motors will cause the motors to stop spinning. To disarm the motors, do the following:
1. Check that your flight mode switch is set to Stabilize, ACRO, AltHold.
2. Hold throttle at minimum and rudder to the left for 2 seconds till the propeller stop to spin.
3. On the MINI PIX the RGB LED will start flashing green.
4. Press the safety button until the led begins flashing
5. Disconnect the LiPo battery.
6. Turn off your transmitter.
It needs GPS if flight with Loiter, or PosHold mode.
Please make sure that the propellers stop to spin and then arm or it will cause the drone roll over.
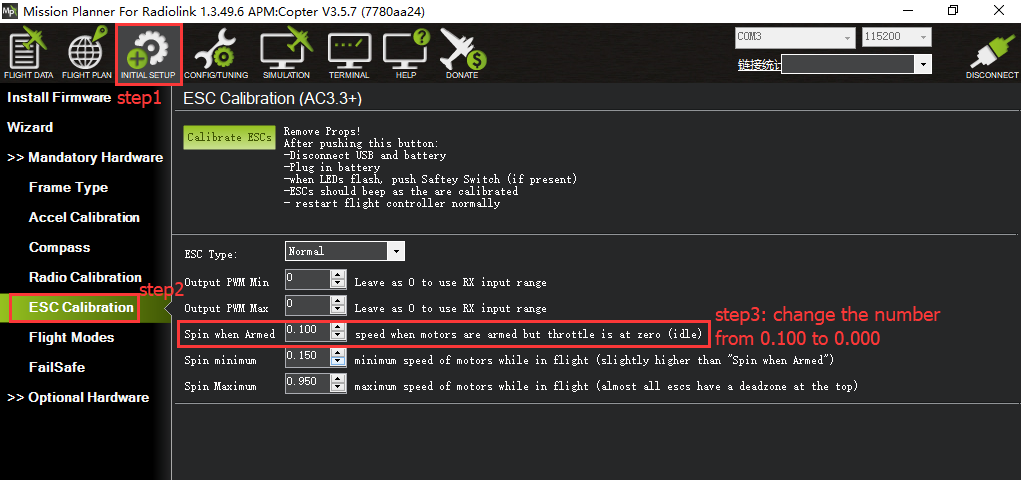
Turn of the function that spin when armed (without speed when motors are armed and throttle is at zero)
If you connect the battery and armed, the motors begin to have speed even though the throttle is at zero from the version 3.1 firmware. It reminds you that MINI PIX is in service and please take care of the safety.
This function is very importance for the safety but if you do not want use this function, you can turn off it.
How to turn off this function:
Setup the number of Spin when Armed from 0.100 to 0.000 as the picture below.
5.4 ESC Calibration
ESC calibration will vary based on what brand of ESC you are using, so always refer to the documentation for the brand of ESC you are using for specific information (such as tones). “All at once” calibration works well for most ESCs, so it is good idea to attempt it first and if that fails try the “Manual ESC-by-ESC” method.
If using BLHeli and/or DShot ESC’s, please refer to for setup.
Some ESCs like the DJI Opto ESCs do not require and do not support calibration, so skip this page completely
Some brands of ESC do not allow calibration and will not arm unless you adjust your radio’s throttle end-points so that the minimum throttle is around 1000 PWM and maximum is around 2000. Note that if you change the end-points on your TX you must re-do the . Alternatively with Copter-3.4 (and higher) you may manually set the to 1000 and to 2000.
If using OneShot ESCs set the to 1 (for regular OneShot) or 2 (for OneShot125). Note only supported in Copter-3.4 (and higher).
Begin this procedure only after you have completed the and part of the . Next follow these steps:Before calibrating ESCs, please ensure that your copter has NO PROPS on it and that the MINI PIX is NOT CONNECTED to your computer via USB and the LiPo battery is disconnected.
ESC calibration steps:
1. Turn on your transmitter and put the throttle stick at maximum.
2. Connect the Lipo battery. The autopilot’s red, blue and yellow LEDs will light up in a cyclical pattern. This means the it’s ready to go into ESC calibration mode the next time you plug it in.
3. With the transmitter throttle stick still high, disconnect and reconnect the battery.
4. For PX4 or Pixhawk, press and hold the safety button until it displays solid red.
5. The autopilot is now in ESC calibration mode. (On an APM you may notice the red and blue LEDs blinking alternatively on and off like a police car).
6. Wait for your ESCs to emit the musical tone, the regular number of beeps indicating your battery’s cell count (i.e. 3 for 3S, 4 for 4S) and then an additional two beeps to indicate that the maximum throttle has been captured.
7. Pull the transmitter’s throttle stick down to its minimum position.
8. The ESCs should then emit a long tone indicating that the minimum throttle has been captured and the calibration is complete.
9. If the long tone indicating successful calibration was heard, the ESCs are “live” now and if you raise the throttle a bit they should spin. Test that the motors spin by raising the throttle a bit and then lowering it again.
10. Set the throttle to minimum and disconnect the battery to exit ESC-calibration mode.
5.5 Level Calibration
If the Mission Planner shows the drone not level when you put it horizontal as this picture, You can setup as below to solve the problem.

Under Initial Setup--Mandatory Hardware--select Accel Calibration from the left-side menu--Click Calibrate Level to start the calibration.
5.6 GeoFence
AC 3.0.1 (and higher) includes a simple “tin can” shaped fence centered on home that will attempt to stop your copter from flying too far away by stopping at the fence (if in Loiter mode and using Copter-3.4 or higher) or initiating an RTL. The maximum circular distance and altitude and the vehicle behavior when the fence is reached can be configured using Mission Planner.
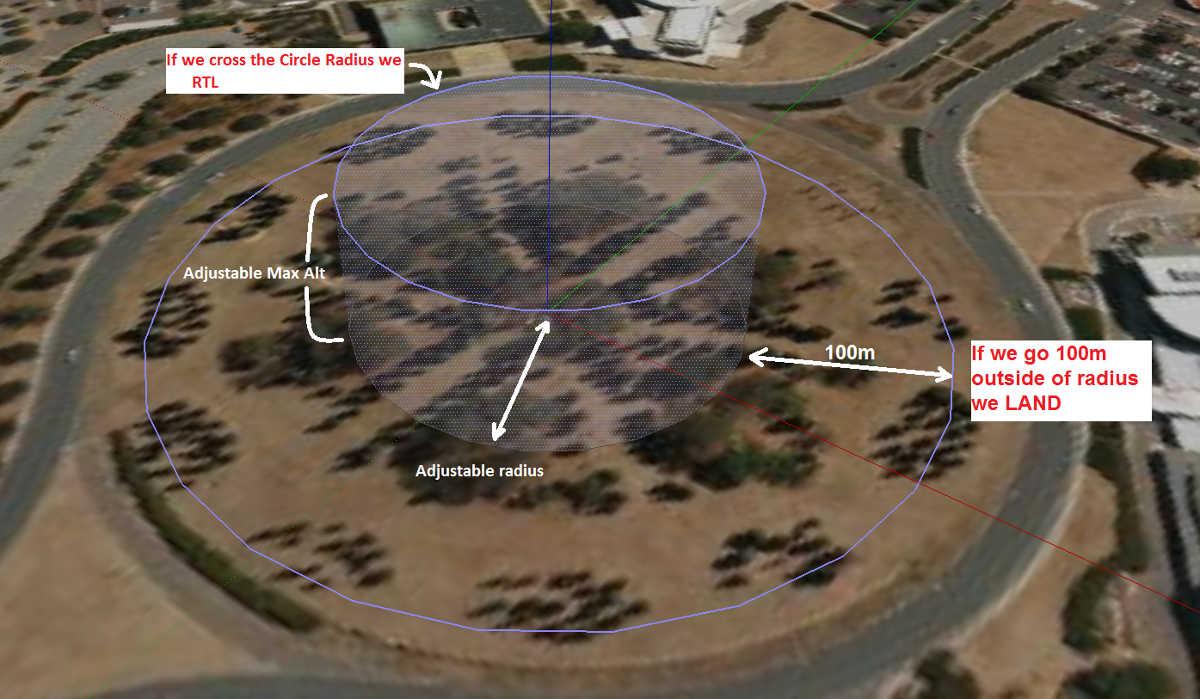
If the vehicle strays outside these borders it will switch into RTL or LAND. At the moment the fence is breached a backup fence is erected 20m further out (or up). If the copter breaches this backup fence (for example if the vehicle is not set up correctly or the operator takes control but is unable to bring the copter back towards home) the copter will be switched into RTL again (and another backup fence an additional 20m further out will be created).
If the copter eventually flies 100m outside the configured fence distance, the vehicle will switch into LAND mode. The idea being that it’s clearly impossible to get the copter home so best to just bring it down. The pilot can still retake control of course with the flight mode switches. Like with the earlier fences, another fence is erected 20m out which will again switch the copter to LAND if it continues away from home.
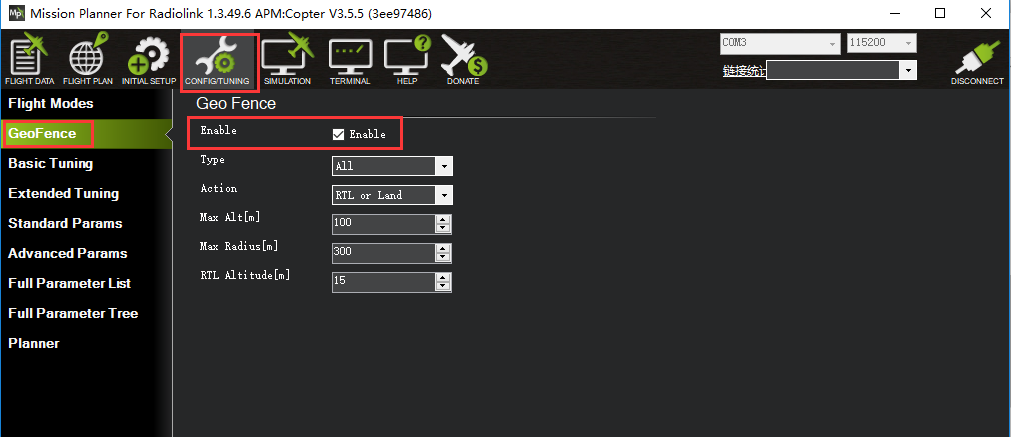
Enabling the Fence in Mission Planner
The Fence can be set-up by doing the following:
1. Connect your flight controller MINI PIX to the Mission Planner.
2. Go to the Config/Tuning -- GeoFence screen.
3. Click the Enable button.
4. Leave the “Type” as “Altitude and Circle” (unless you want only an Altitude limit or only a Circular fence in which case you can select “Altitude” or “Circle”).
5. Leave the Action as “RTL or Land”.
6. Set “Max Alt” to the altitude limit you want (in meters).
7. Set “Max Radius” to the maximum distance from home you want (in meters). This should normally be at least 50m.
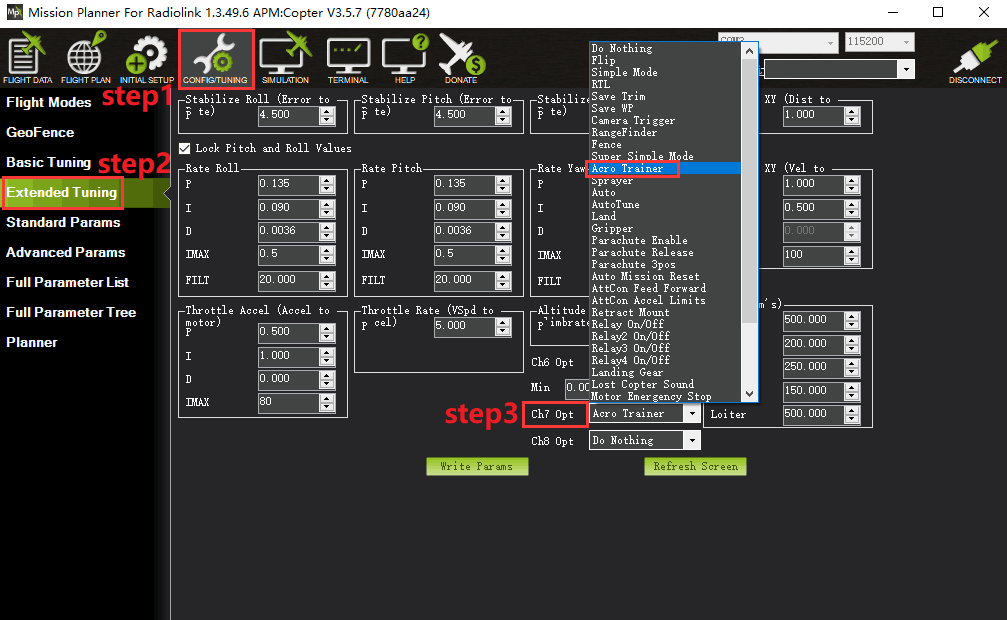
Enabling the fence with channel 7 or 8.
It is not necessary to set-up a switch to enable or disable the fence but if you wish to control the fence with a switch please follow these steps:
1. Go to the Mission Planner’s Config/Tuning > Extended Tuning screen and set either “Ch7 Opt” OR “Ch8 Opt” to Fence.
2. Holding the switch high (i.e. PWM > 1800) will enable the fence, low (under 1800) will disable the fence.

Warning
1. The minimum recommended fence radius is 30m.
2. The fence requires the GPS to be functioning well so do not disable the nor the while the fence is enabled. Conversely if you disable either of these checks, disable the Fence.
3. For the best results, ensure RTL is working on your vehicle.
4. With the Fence enabled, the pre-arm checks will require you have GPS lock before arming the vehicle.
5. If GPS failsafe is not enabled and the Fence is enabled and you lose GPS lock while flying the fence will be disabled.
6. If GPS failsafe is enabled and the Fence is enabled and you lose GPS lock while flying the vehicle will switch to LAND because we no longer know the vehicle position and we want to ensure the copter never travels far outside the fence. This behavior will occur regardless of the flight mode. If a LAND sequence is not desired, the pilot can retake control by moving the flight mode switch.
7. The backup fences are created 20m out from the previous breached fence not 20m out from the vehicle’s position. This means if you choose to override the fence you may have less than 20m to regain vehicle control before the fence switches the copter to RTL (or LAND) again. If you really want to override the fence, you should be ready to switch the flight mode twice or alternatively set-up the enable/disable fence switch.
Circle and Polygon: Combining with the Circular and Altitude fences.
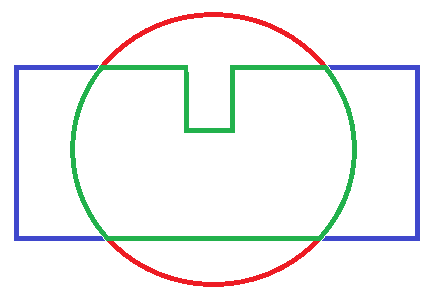 The polygon fence can be used in combination with the and the failsafe behavior (i.e. stop at the fence or RTL) will trigger at whichever barrier the vehicle reaches first (i.e. the green line shown below).
The polygon fence can be used in combination with the and the failsafe behavior (i.e. stop at the fence or RTL) will trigger at whichever barrier the vehicle reaches first (i.e. the green line shown below).
6. AutoTune
AutoTune attempts to automatically tune the Stabilize P, Rate P and D, and maximum rotational accelerations to provide the highest response without significant overshoot. Copter needs to be “basically” flyable in before attempting to use AutoTune as the feature needs to be able to “twitch” the copter in the roll and pitch axis.
Position Hold during AutoTune is available in Copter 3.5 (and higher).
Setup before flying
1. Set up one flight mode switch position to be AltHold.
2. Set an to Autotune to allow you to turn the auto tuning on/off with the a switch.
3. Remove the camera gimbal or any other parts of the frame that could wobble in flight
4. Select which combination of axis (roll, pitch, yaw) you wish to tune using the parameter
5. Set the autotune’s aggressiveness using the parameter (0.1=agressive, 0.075=medium, 0.050=weak), normally start with the default 0.1.
6. For large copters (with props at least 13inch or 33cm diameter) set the Rate Roll and Pitch filters to 10hz (in Copter-3.3 these are RATE_RLL_FILT_HZ and RATE_PIT_FILT_HZ, in Copter-3.4 they are ATC_RAT_RLL_FILT, ATC_RAT_PIT_FILT)
7. It is recommended to enable

How to invoke AutoTune
1. Wait for a calm day and go to a large open area.
2. Ensure the ch7 or ch8 switch is in the LOW position.
3. Take off and put the copter into AltHold mode at a comfortable altitude.
4. Face the vehicle so that it will twitch at 90degrees from the direction the wind is blowing (i.e. if tuning Roll first, point the vehicle into the wind)
5. Set the ch7/ch8 switch to the HIGH position to engage auto tuning:
(1) You will see it twitch about 20 degrees left and right for a few minutes, then it will repeat forward and back.
(2) Use the roll and pitch stick at any time to reposition the copter if it drifts away (it will use the original PID gains during repositioning and between tests). When you release the sticks, it will continue auto tuning where it left off.
(3) Move the ch7/ch8 switch into the LOW position at any time to abandon the autotuning and return to the origin PIDs.
(4) Make sure that you do not have any trim set on your transmitter or the autotune may not get the signal that the sticks are centered.
6. When the tune completes the copter will change back to the original PID gains.
7. Put the ch7/ch8 switch into the LOW position then back to the HIGH position to test the tuned PID gains.
8. Put the ch7/ch8 switch into the LOW position to fly using the original PID gains.
9. If you are happy with the autotuned PID gains, leave the ch7/ch8 switch in the HIGH position, land and disarm to save the PIDs permanently.
If you DO NOT like the new PIDS, switch ch7/ch8 LOW to return to the original PIDs. The gains will not be saved when you disarm.
If you find after performing an AutoTune that the vehicle feels overly twitchy when flying Stabilize, AltHold or PosHold (but ok in more autonomous modes like Loiter, RTL, Auto) try reducing the RC_FEEL parameter to 0.25. This smooths out the pilot’s input. Alternatively try reducing the parameter (it should always be in the range 0.05 to 0.10) and try again.
If the vehicle feels sloppy after the AutoTune, try increasing the parameter as high as 0.10 and attempt the autotune again.
All of the parameters of MINI PIX can setup in Mission Planner, please do not change the parameters during the flight.
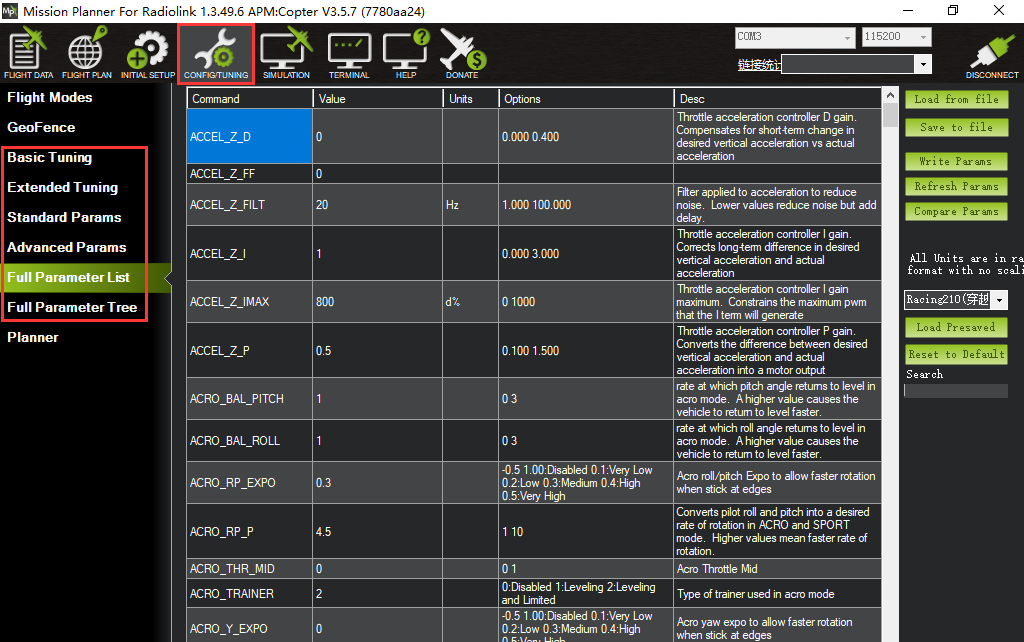
Function button for Full Parameter List/Tree introduction:
Load from file: load the files with the parameters have setup already.
Save to file: save the file with the parameters to your computer.
Write Params: write the parameters that have modified to MINI PIX.
Refresh Params: exhibit the newest parameters which have modified no the Mission Planner.Compare Params: compare the current and the previous parameters.
Load Presaved: load the parameters that Radiolink upgrade the files which design for 210-250 frame racing drone to MINI PIX.
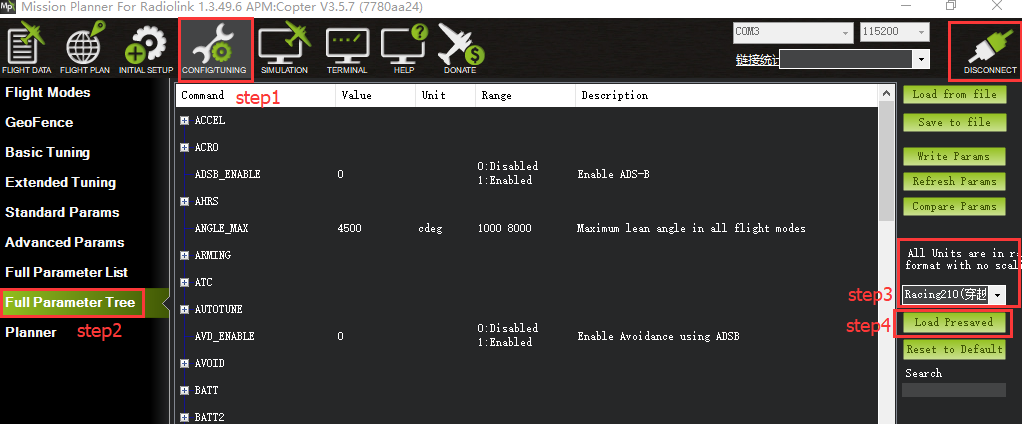
Reset to default: reset all the parameters to default files. Please recalibrate and re-setup all the parameters after reset.
Search: write down the name of parameters you want to setup, much same as the keyboard shortcuts function.
7. Download DataFlash Log
There are two ways to record your flight data. With some exceptions, the two methods record very similar data but in different ways:
use the MINI PIX onboard dataflash memory, which you can download after the flight. On Plane and Rover dataflash logs are created soon after start-up. On Copter they are created after you first arm the copter.
(also known as “tlogs”) are recorded by the Mission Planner (or other ground station) when you connect ArduPilot to your computer via a .
If you are not yet familiar with the basics of these log files, first review the introductory pages to understand where these logs are stored and how you can download and view the information held within them.
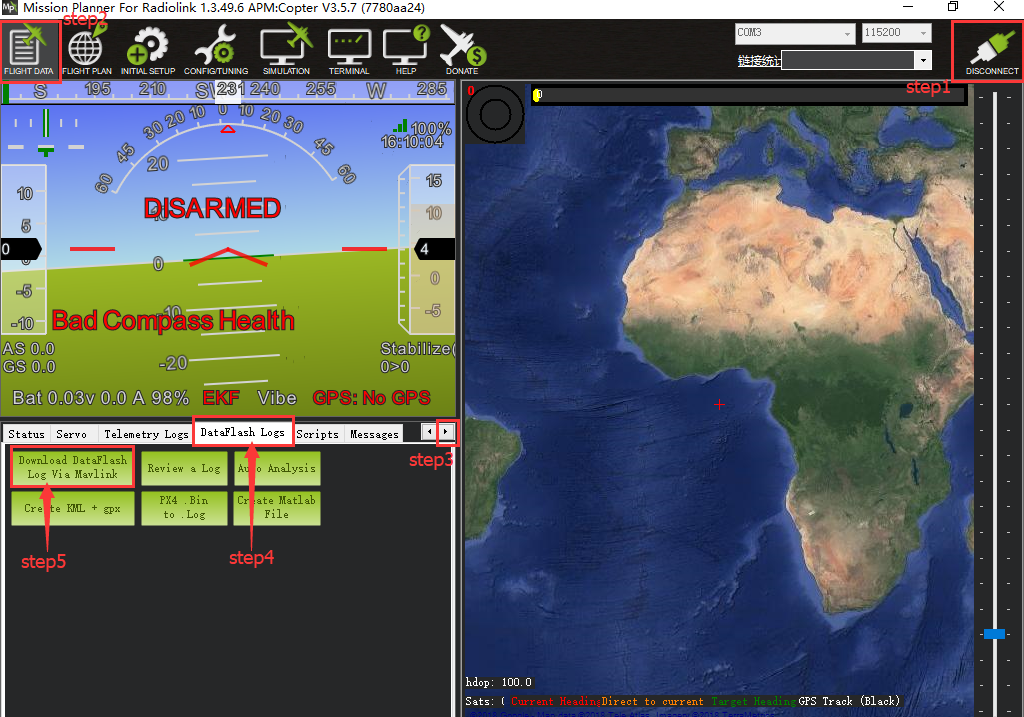
More details about how to use PIXHAWK, MINI PIX, APM, please check on this website:





