
-


- 2023-05-23
- 2023-05-18
- 2022-07-06
- 2022-06-24
- 2022-06-23
- 2022-06-22
- 2022-06-21
- 2022-06-21
- 2022-06-17
- 2022-06-16
- 2022-06-15
-

- 2024-01-24
- 2024-03-28
- 2022-07-06
- 2022-07-09
- 2024-04-11
- 2022-07-07
-




-
-





")
")


























")
")
")








")










")








































1.1 直接连接飞控
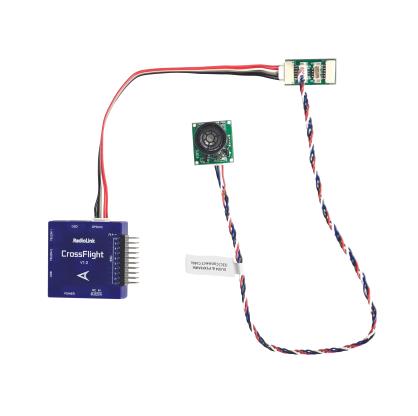
SUI04标配一条连CrossFlight/Mini Pix的连接线(4 Pin对6 Pin),4 Pin端连接SUI04,6 Pin端连接CrossFlight的GPS口,如下图所示:

用CrossFlight标配的12C转接板连接线(6 Pin对6 Pin),一端连接飞控的 GPS 口,另一端连接 I2C 转接板。其次用SUI04标配的12C口/PIXHAWK连接线(4 Pin对4 Pin),一端接 I2C 转接板,另一端连接SUI04,如下图所示:
注:CrossFlight飞控的I2C接口不能同时连接6个以上设备,否则有可能会出现数据丢失的现象。
要使用模块作为定高功能时,需要通过按键来设置模块的方向为向下,具体操作,按SUI04的模块上按键,每按一次按键,模块方向改变一次,按完一次,需要等待模块灯闪烁完,再按第二次,按到模块的灯慢闪5次,则代表模块当前的方向为向下。
2. 再将RNGFND1_MAX_CM设置为450,RNGFND_MIN_CM设置为43(单位:cm),RNGFND1_ORIENT设置成25。
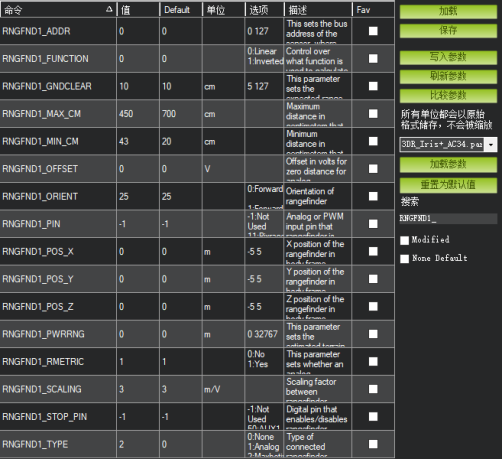
RNGFND1_MAX_CM是飞控在定高模式下能识别模块的最大距离。
RNGFND1_MIN_CM是飞控在定高模式下能识别模块的最小距离。
当模块发送的距离超过43~450cm时,飞控不识别模块的距离,通过气压计的高度来进行定高。
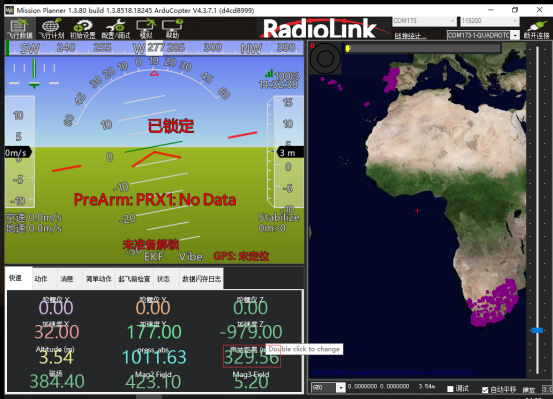
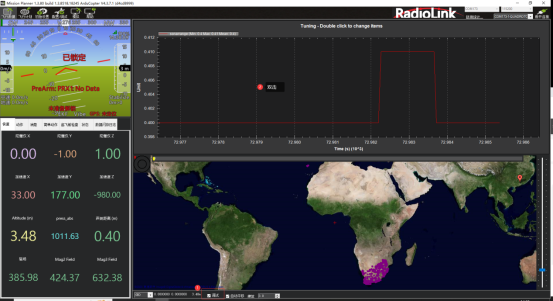
(1)在快速界面查看超声波数据。
将飞控连接地面站,在快速界面,双击选项卡,出来一个大的列表。在列表中选择sonarrange,则在该位置就会显示超声波的高度数据。
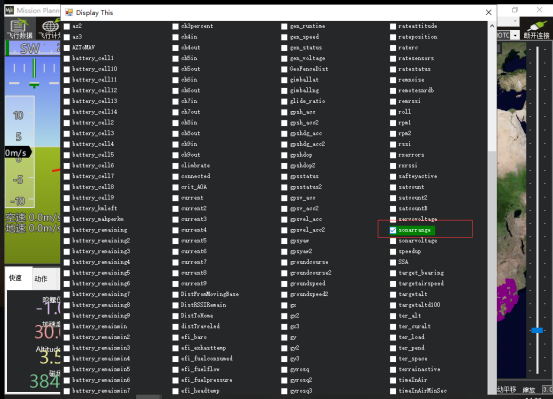
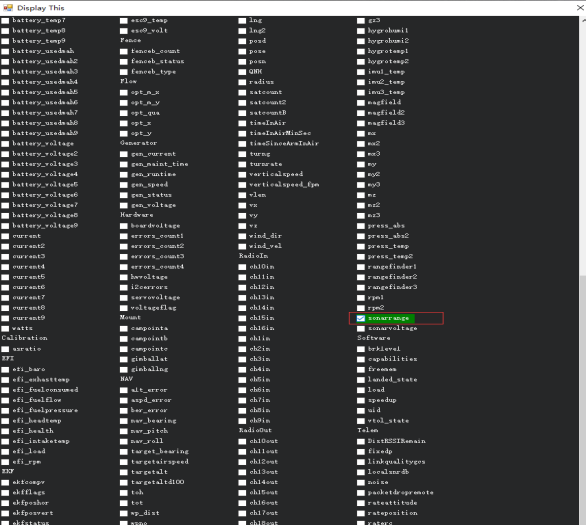
(2)在调试界面显示超声波数据。
勾选地面站的调试选项,双击弹出的动态表格,在列表中选取sonarrange,即可显示超声波数据的动态波形。如下图所示:
SUI04模块可以实现水平4个方向(前、后、左、右)的避障,需要通过模块的按键来改变模块的方向。模块默认的方向是向前,当每按一次按键,模块的方向顺时针改变一次,并且模块的灯会闪烁相应的次数(1次为前、2次为右、3次为后、4次为左),提示当前模块的方向,并且永远保存该方向作为模块的方向。方向设置好后,模块需要断电重启。
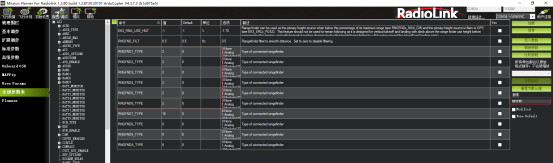
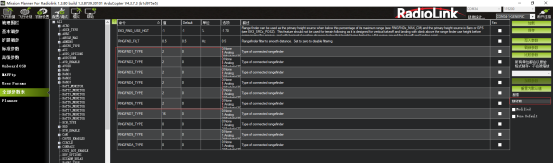
(1)将SUI04与飞控连接。先在全部参数表中搜索PRX1_TYPE,并将值修改成4,接着在全部参数表中搜索RNGFND,将RNGFNDx_TYPE修改成2(x表示超声波序号)。最后重启飞控。如下图所示:
![]()
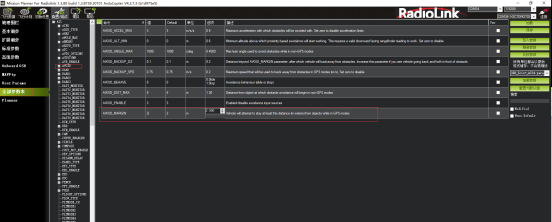
(2)如下图所示,在全部参数表中搜索RNGFND1。将RNGFND1_ADDR修改成 116,RNGFND1_MAX_CM修改成450,RNGFND1_MIN_CM修改成43,将RNGFND1_ORIENT修改成0(0表示超声波方向为向前)


(4)如下图所示,在全部参数表中搜索RNGFND3。将RNGFND3_ADDR修改成 114,RNGFND3_MAX_CM修改成450,RNGFND3_MIN_CM修改成43,将RNGFND3_ORIENT修改成4(4表示超声波方向为向后)

(5)如下图所示,在全部参数表中搜索RNGFND4。将RNGFND4_ADDR修改成 115,RNGFND4_MAX_CM修改成450,RNGFND4_MIN_CM修改成43,将RNGFND4_ORIENT修改成6(6表示超声波方向为向左)

(6)点击写入参数,并将飞控断电重启。重新连接地面站后,即可识别到SUI04。
(1)模块的避障距离可通过改变AVOID_MARGIN这个值来设置。
AVOID_MARGIN:留待模式下的最大避障距离,单位m
(2)参数设置
在全部参数表搜索AVOID_MARGIN,将AVOID_MARGIN的值改为3(即3m,有效值为1~10),再点击右侧的-写入参数即可,如下图所示:
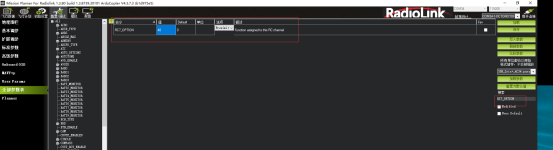
(3)飞控设置RC7_OPTION参数。
进入-配置/调试界面,点击左侧-全部参数表,搜索RC7_OPTION ,将该参数的值设置为40(物体避障功能),再点击右侧的-写入参数即可,如下图所示:
(4)遥控器设置
设置遥控器打开和关闭避障功能此项是可选项,可跳过。
飞控默认在留待模式下,避障功能自动打开,切回自稳时,避障功能自动关闭。但是如果想实时通过遥控器来开启或关闭避障功能,需要进行此项设置。如果想只在定高和留待模式下,自动开启避障功能,可以跳过此项设置。设置方法如下:
1) 选择一个二挡开关作为控制7通道的开关;
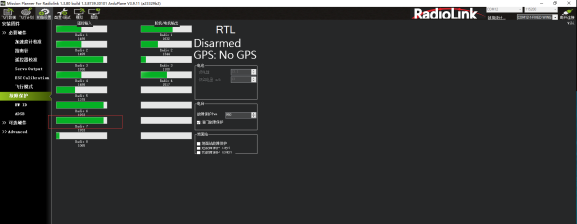
2) 在地面站的初始设置界面下的必要硬件的下拉列表中,左击故障保护,打开即可显示7通道的PWM值的界面;
3) 当拨动该开关时,7通道的PWM值大于1800,代表开关拨动到该位置时,避障功能打开,拨动到另一个方向是,避障功能关闭。如下图所示:
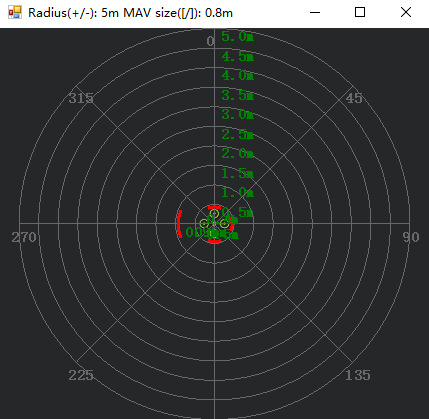
将飞控与地面站连接,键盘按下CTRL+F,在弹出窗口点击Proximity。如下图所示:
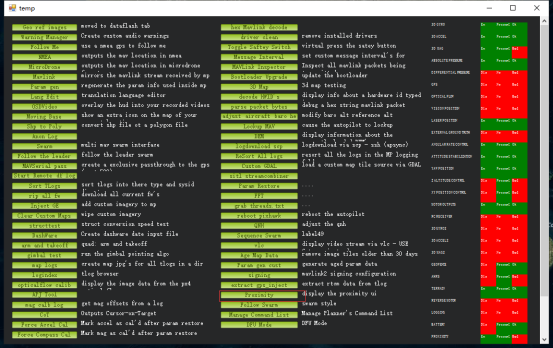
如下图所示,可以在弹出窗口中显示超声波数据。
SUI04模块支持向上防撞功能向上防撞和避障功能一致,但需要通过按键来设置模块的方向为向上,具体操作,按SUI04的模块上按键,按到模块的灯慢闪6次,则代表模块当前的方向向上。对应的防撞距离可以前面的方法设置AVOID_MARGIN(防撞距离)的值即可。
(1)将SUI04与飞控连接。进入-配置/调试界面,点击左侧-全部参数表,在右下角-输入框中输入PRX1_TYPE,并将值修改成4,接着在全部参数表中搜索RNGFND,将RNGFNDx_TYPE修改成2(x表示超声波序号)。最后重启飞控。如下图所示:
![]()
(2)如下图所示,在全部参数表中搜索RNGFND。将RNGFNDx_ADDR(x表示超声波序号)修改成 117,RNGFNDx_MAX_CM修改成450,RNGFNDx_MIN_CM修改成43,将RNGFNDx_ORIENT修改成24(24表示超声波方向为向上)

由于数据查看窗口只能查看水平方向的距离,因此查看向上模块的数据时,需要通过日志才能查看向上模块的数据。具体操作如下:
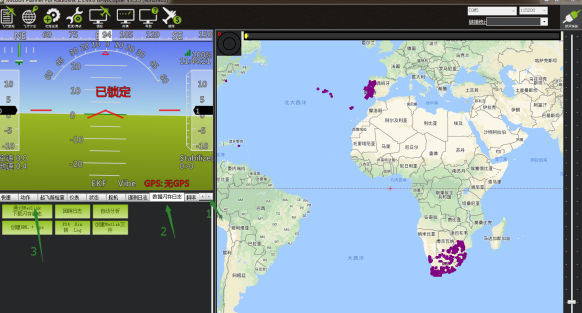
通过地面站连接飞控,连接后进行如下操作,进行日志下载。
点击要查看的日志,并点击下载这些日志来下载选中的日志。
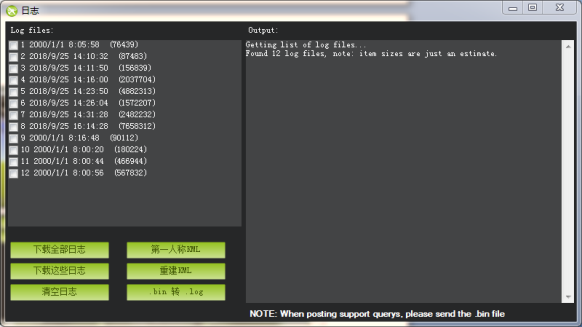
通过下图步骤打开日志文件点击回顾日志,然后打开日志文件 。

按下图的1、2步骤进行操作 。
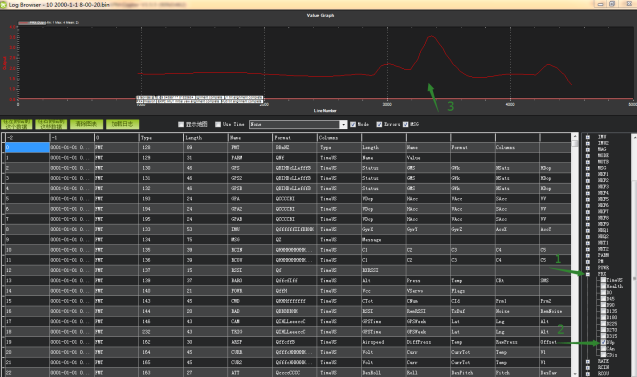
图表中所示的数据即为超声波检测到的物体的距离。

