
-


- 2023-05-23
- 2023-05-18
- 2022-07-06
- 2022-06-24
- 2022-06-23
- 2022-06-22
- 2022-06-21
- 2022-06-21
- 2022-06-17
- 2022-06-16
- 2022-06-15
-

- 2024-01-24
- 2024-03-28
- 2022-07-06
- 2022-07-09
- 2024-04-11
- 2022-07-07
-




-
-





")
")


























")
")
")








")










")








































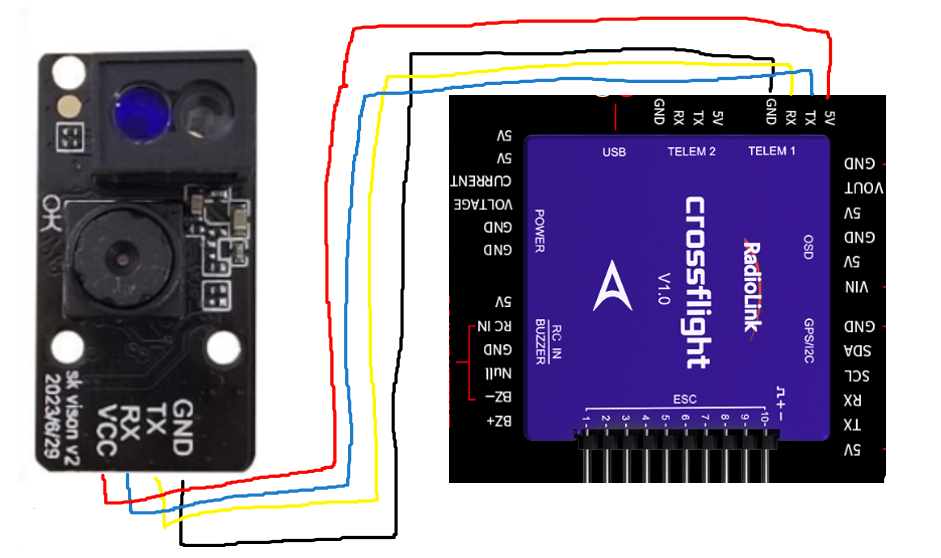
1. 安装及方向
光流传感器镜头朝下,左边小人头与飞控箭头方向一致,连接飞控串口。




2. 地面站参数配置
飞控通过TYPE_C连接Mission Planner 地面站,右上角选择正确的端口号和波特率,等待连接成功后点击配置/调试页面→选择全部参数表
首先,设置 FLOW_TYPE为5,设置RNGFND1_TYPE为10,点击写入数据保存设置;
然后,拔掉crossflight飞控,重新连接至地面站;
再设置参数如下:
飞控EK源配置
设置EK3_SRC_OPTIONS为0
设置EK3_SRC1_POSXY为0
设置EK3_SRC1_POSZ为1
设置EK3_SRC1_VELXY为5
设置EK3_SRC1_VELZ为0
设置EK3_SRC1_YAW为1
光流及测距仪配置
设置FLOW_ORIENT_YAW为18000
设置 RNGFND1_GNDCLEAR为10
设置RNGFND1_MAX_CM为500
设置RNGFND1_MIN_CM为4
设置RNGFND1_ORIENT为25
设置SERIAL_BAUD为115
设置SERIAL1_PROTOCOL为1

