
-


- 2023-05-23
- 2023-05-18
- 2022-07-06
- 2022-06-24
- 2022-06-23
- 2022-06-22
- 2022-06-21
- 2022-06-21
- 2022-06-17
- 2022-06-16
- 2022-06-15
-

- 2024-01-24
- 2024-03-28
- 2022-07-06
- 2022-07-09
- 2024-04-11
- 2022-07-07
-




-
-





")
")


























")
")
")








")










")








































下面简单介绍如何设置Mini Pix/crossflight通道输出,从而控制舵机,触发相机快门。
注意,使用者需要根据实际的舵机、结构、相机进行调试。
1.设置触发动作。
在全部参数表里面搜索 CAM

其中,通过CAM_SERVO_ON和CAM_SERVO_OFF调节快门按下的幅度。
CAM_DURATION调节按快门的时间,10ds 就是1秒。50就是5秒。
CAM_TRIGG_TYPE设为0,作为舵机输出控制。
CAM_MIN_INTERVAL可以设置拍照最小间隔时间。
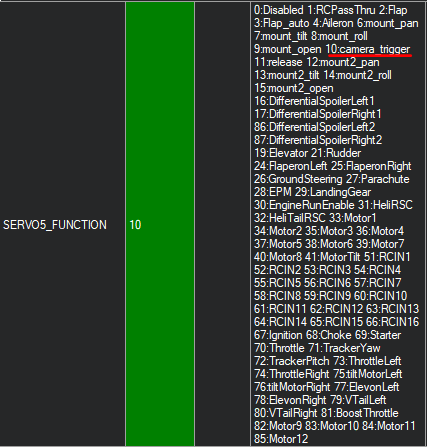
2.设置通道功能。
以5通为例,在全部参数表里面搜索 SERVO5
将参数设置为 10 ,即为camera_trigger触发功能。
3. 设置遥控器动作
在扩展调参里面设置功能。例如,用遥控器8通道触发Camera Trigger。
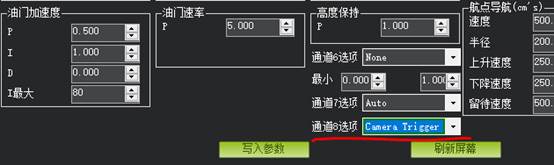
至此,设置完成。
更多关于CAM_TRIGG的资讯请参考:

