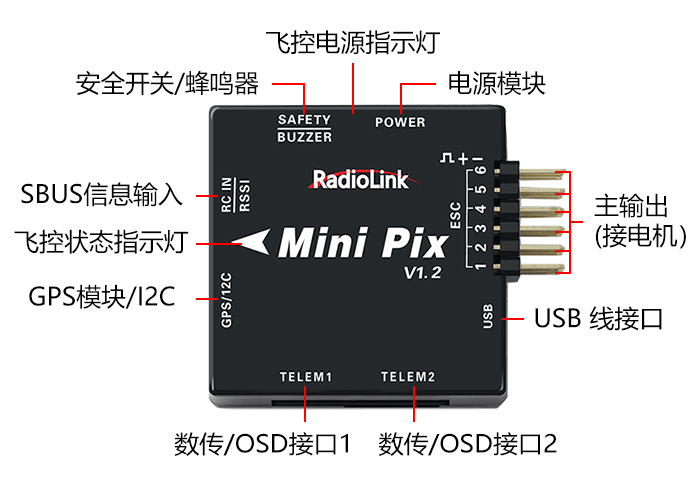
MiniPix飞控概览
部件

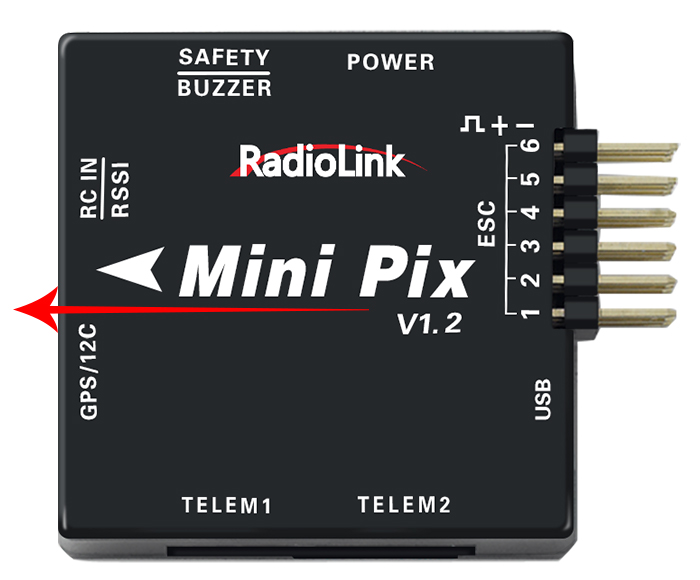
端口和技术参数

技术参数
重量与大小
尺寸:39*39*12mm
重量:12g
硬件参数
主处理器:STM32F405VGT6
传感器
陀螺仪:MPU6500
电子罗盘:QMC5883L
气压计:LPS22HB
接口:JST GH连接器
Mavlink UART串口:2(带硬件流控)
GPS UART串口:1
遥控器信号(RC In口):PPM/SBUS
RSSI信号强度输入:PWM/3.3V
I2C口:3
PWM输出:6 OneShot/PWM输出(可配置)
蜂鸣器(BUZZER):1
安全开关(SWITCH):1
电源模块参数
输入电压:2-12S
输入电流:90A
输出电压:5.1V
输出电流:2.5A
单路持续输出电流:20A
支持机型:固定翼/3-6旋翼/直升机/VTOL垂直起降/车/船/机甲/机器人
工作环境及物理参数
USB电压:5V±0.3V
Servo电压:不支持输入
工作温度:-40~80℃
使用建议
对于初次使用Mini Pix飞控的用户来说,建议你分步骤完成飞控的入门使用:
① 首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能;
② 仅连接USB线学会固件的下载;
③ 连接接收机和USB线完成飞控的遥控校准、加速度校准和罗盘校准;
④ 完成各类参数的设定;
⑤ 组装飞机,完成各类安全检查后试飞;
⑥ PID参数调整;
⑦ 飞控各类高阶应用。
地面站
地面站安装
首先,Mission Planner的安装运行需要微软的Net Framework 4.6.2 组件
官方下载地址为:.net4.6.2下载链接
安装完Net Framework后开始Mission Planner安装程序包:Mini Pix专用地面站下载链接
安装过程中会弹出设备驱动程序安装向导时,请点击下一步继续,等待安装完成

特别提醒:
① 有些精简版GHOST系统和64位WIN7系统因缺少相关文件会导致驱动无法正常加载,出现设备管理器中设备名称出现感叹号情况

请按PIX驱动安装失败文档手动解决,或使用软件自动安装解决,软件下载链接如下:驱动安装失败自动解决软件
打上补丁后再重新检索安装驱动程序,驱动是否成功安装的标志就是在设备管理器中正确识别了标识为PX4FLOW的端口号。

② 还有出现在设备管理器中设备在上电瞬间正常显示,之后出现消失或者出现感叹号情况;此种情况可能为USB供电不足导致,请拔出电脑上其他USB设备后进行连接
认识地面站的界面
安装完Mission Planner和驱动后,现在可以开始启动Misson Planner主程序了,初次打开会有几个提示,第一个请选择Yes,后面请都选择NO
主界面左上方为八个主菜单按钮:
① 飞行数据实时显示飞行姿态与数据;
② 飞行计划是任务规划菜单;
③ 初始设置用于固件的安装与升级以及一些基本设置;
④ 配置调试包含了详尽的PID调节,参数调整等菜单;
⑤ 模拟是给Mini Pix刷入特定的模拟器固件后,将Mini Pix作为一个模拟器在电脑上模拟飞行使用;
⑥ 终端是一个类似DOS环境的命令行调试窗口,功能非常强大。

使用前准备
下载刷入固件
Mini Pix拿到手后首先要做的就是给它刷入你自己需要的固件,虽然卖家在销售前可能会帮你刷入固件,但是未必是符合你要求的固件,所以学会刷新PIX的固件是你的必修课之一。
固件安装前请先连接Mini Pix的USB线到电脑(普通的安卓手机数据线即可),确保电脑已经识别到Mini Pix的COM口号后(如无法识别请查看2步骤的驱动安装失败解决办法),打开Mission Planner(以下简称MP),在MP主界面的右上方端口选择下拉框那里选择对应的COM口,然后波特率选择115200。
注意:
① 请不要点击 connect 连接按钮,如果你之前已经连接了 PIX,请点击Disconnect断开连接之后再开始刷固件,否则固件安装过程中弹出错误提示
② 请不要用无线数传安装固件,虽然无线数传跟USB有着同样的通信功能,但它缺少reset信号,无法在刷固件的过程中给PIX复位,会导致安装失败。
③ 如果安装固件页面没有出现图示数字版本号,提示获取固件失败,可能是网络问题,请再次点击安装固件选项,重新打开安装固件页面,直到网络连接正常出现数字版本号。
点击安装固件,窗口右侧会自动从网络下载最新的固件并以图形化显示固件名称以及固件对应的飞机模式,你只需要在对应你飞机模式的图片上点击,MP就会自动从网络上下载该固件,出现如下提示

请先拔下USB线,点击OK,在马上插上USB线,然后自动完成连接识别飞控,刷入固件(请注意,在有多个COM口名称出现的情况下可能会出现失败情况,请先去除其他设备)
也有可能出现假死界面显示已经连接飞控,不用担心此时也在进行刷写固件,可以查看飞控状态指示灯红色常亮,此时正在刷写固件
3.1版本以后的固件在安装完后都会先弹出一个警告提示框
这是在提醒你:这个版本的固件在解锁后,电机就会以怠速运行
固件安装提示Done成功后,你就可以点击右上角的connect连接按钮连接飞控,进行设置校准
注意:
① 飞控连接地面站读取参数过程较长。
② 无“加载自定义固件”和“选择以前固件”这两个选项:

③“配置调试”选项中无全部参数表。
当你连接地面站调参与刷固件时遇到以上三种情况,可以把“爬升率测定”选项从初始值“Basic”更改为“Advanced”,操作步骤如下:

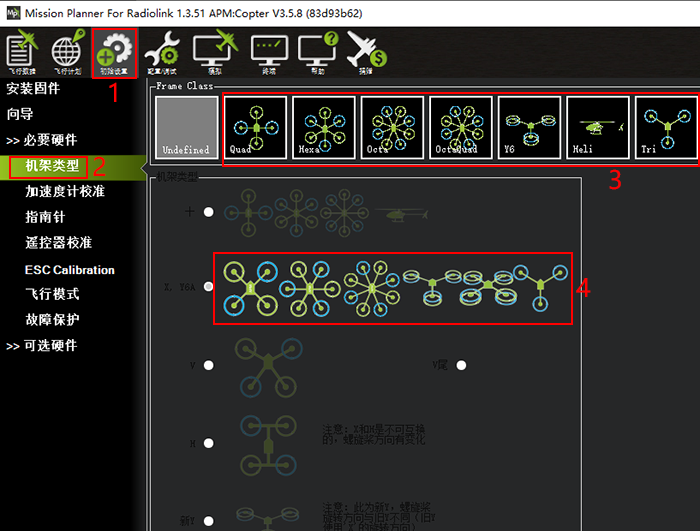
机架类型选择
注意:下图的向导界面存在问题,请不要用向导界面设置飞控,后期这个界面会改善!

请选择机架类型按照图示步骤进行操作选择:
① 初始设置
② 必要硬件->机架类型
③ 选机架类型(几轴)
④ 选择机架形状
加速度校准
加速度的校准建议准备一个六面平整,边角整齐的方形硬纸盒或者塑料盒,之后按如图步骤开始校准是,执行6个动作,每次按电脑回车键确认
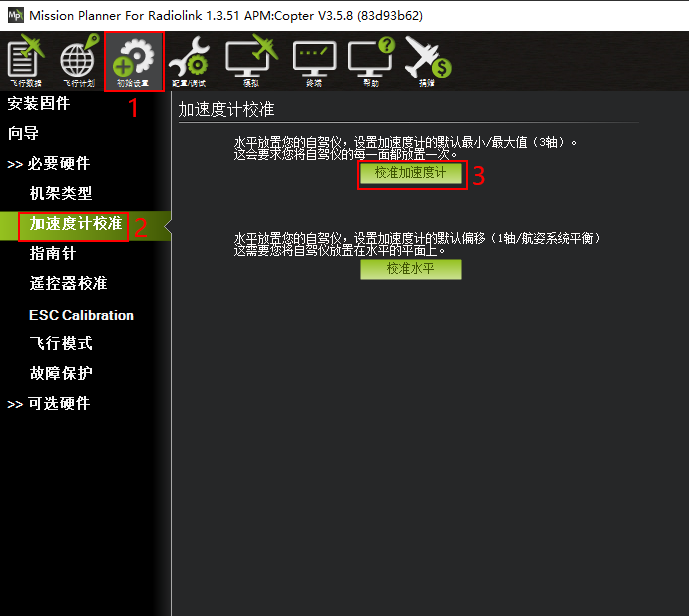
① Place vehicle level and press any key(水平放置)完成后回车键保存

② Place vehicle on its LEFT side and press any key(向左边放置)完成后回车键保存

③ Place vehicle on its RIGHT side and press any key(向右边放置)完成后回车键保存

④ Place vehicle nose DOWN and press any key(向下放置)完成后回车键保存

⑤ Place vehicle nose UP and press any key(向上放置)完成后回车键保存

⑥ Place vehicle on its BACK and press any key(反过来放置)完成后回车键保存

遥控校准
首先进行遥控校准,遥控校准需要连接你的接收机,飞控通过USB数据线成功连接地面站(也可以通过数传进行连接),具体连接请查看第1.2段端口注解图。
本文档内遥控器都以乐迪AT9S为例,都在多旋翼模型下的设置,之后不再说明,请按说明书进行遥控器接收机对码连接,然后打开遥控器电源,当遥控器休眠锁定状态(按键,拨盘无效状态),请按住拨盘中间的Push键进行解锁
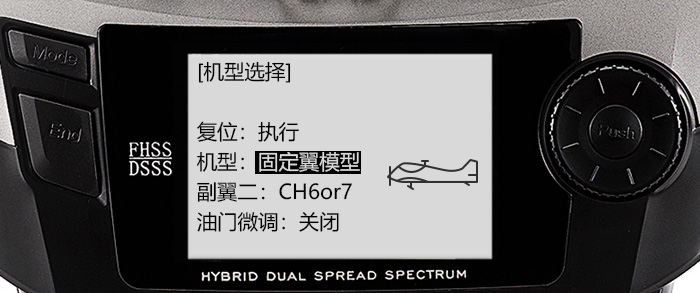
① 按Mode键,进入基础菜单,选择机型选择,进入拨动拨盘到机型选项,按Push进行选中,拨动拨盘,选择多旋翼模型,按Push键等待滴滴响声结束即保存模式,之后按End退出
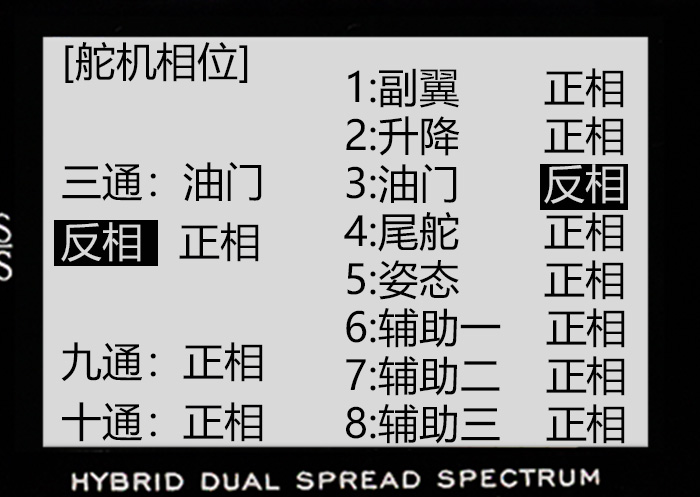
② 因为对于AT9S遥控器,需要把油门反相,所以请按Mode键,进入基础菜单,选择舵机相位,选择3:油门,按Push选中,拨动拨盘选择到反相,按Push选中保存,按End退出即可,遥控器设置完成
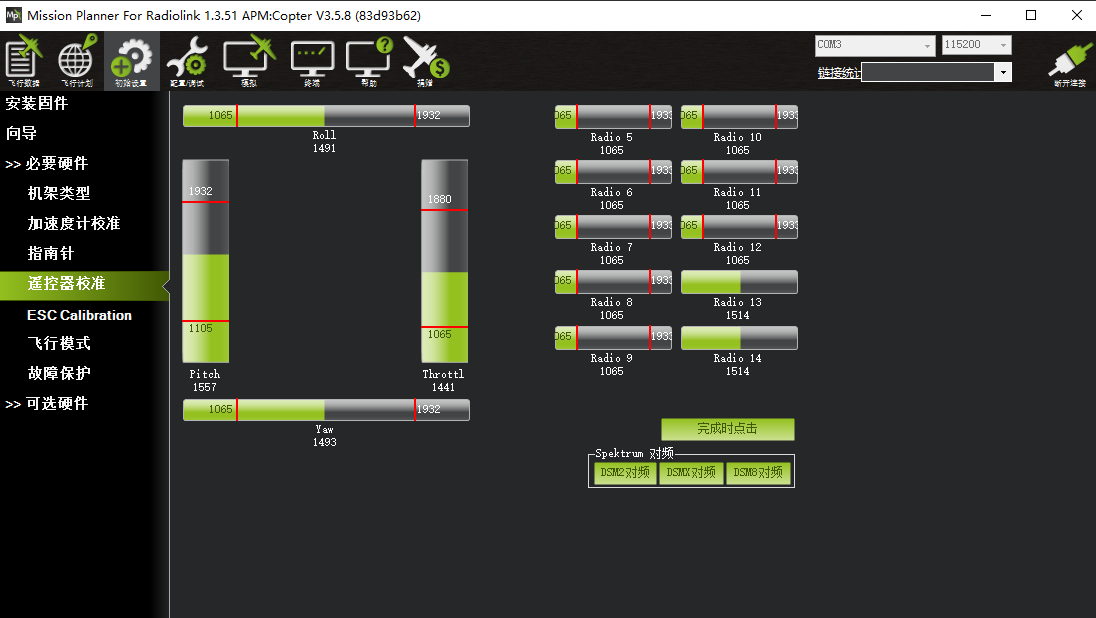
③ 运行 MP,按下图步骤选择好波特率与端口后点击connect连接飞控,接着点击初始设置——必要硬件——遥控器校准——点击窗口右边的校准遥控按钮

④ 点击校准遥控后会依次弹出两个提醒:分别是确认你遥控发射端已经打开and接收机已经通电连接,确认你的电机没有通电
⑤ 然后点击OK开始拨动遥控开关,使每个通道的红色提示条移动到上下限的位置
⑥ 当每个通道的红色指示条移动到上下限位置的时候,点击完成时点击保存校准后,完成遥控器的校准。如果你拨动摇杆时上面的指示条没有变化,请检查接收机连接是否正确,另外同时检查下每个通道是否对应你的发射机应能引起下列控制变化:
通道1:低 = roll 向左,高 = roll 向右。
通道2:低 =pitch向前,高=pitch向后。
通道3:低 =油门减(关),高=油门加。
通道4:低 = yaw向左,高 = yaw向右。
罗盘校准
罗盘校准的方法有两种,通过地面站校准和通过遥控器校准
通过地面站校准罗盘
通过地面站校准罗盘,有两种情况:
- ① 带罗盘的GPS模块,使用外置和内置罗盘
- ② 不带GPS,使用内置罗盘
(1) 当带使用带有罗盘芯片的GPS时,此时指南针校准界面会出现如下图界面
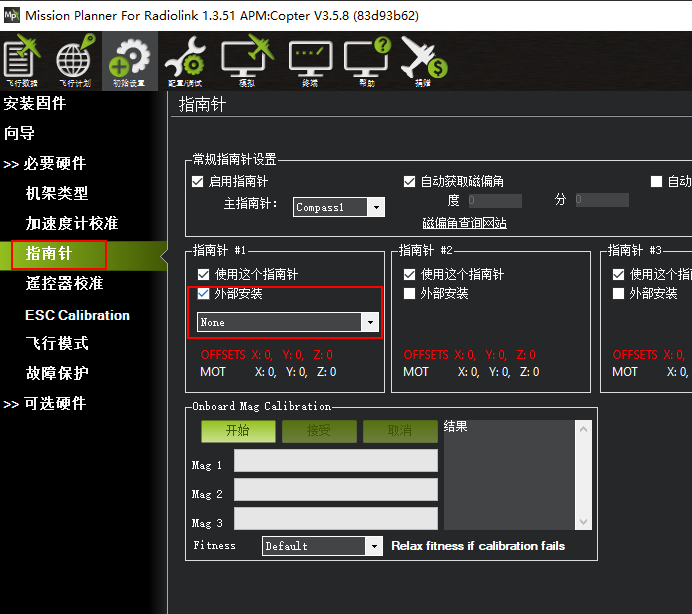

出现指南针1号上添加了外部安装和方向选择框,此时指南针1号就是外置罗盘(GPS上的罗盘),指南针2号就是飞控内置罗盘;当GPS安装方向与飞控方向一致时,无需任何操作方向默认为None,当GPS安装方向不一致时候需要选择对应的方向,具体参考飞行器安装5.1章节

此图中为GPS和飞控方向一致
当安装方向选择并固定好后,点击开始按钮,转动飞控与GPS
(2) 当没有GPS连接时,校准界面如下图显示

界面上没有外部安装显示,此时指南针1号为飞控内部罗盘,直接点击开始按钮开始转动校准
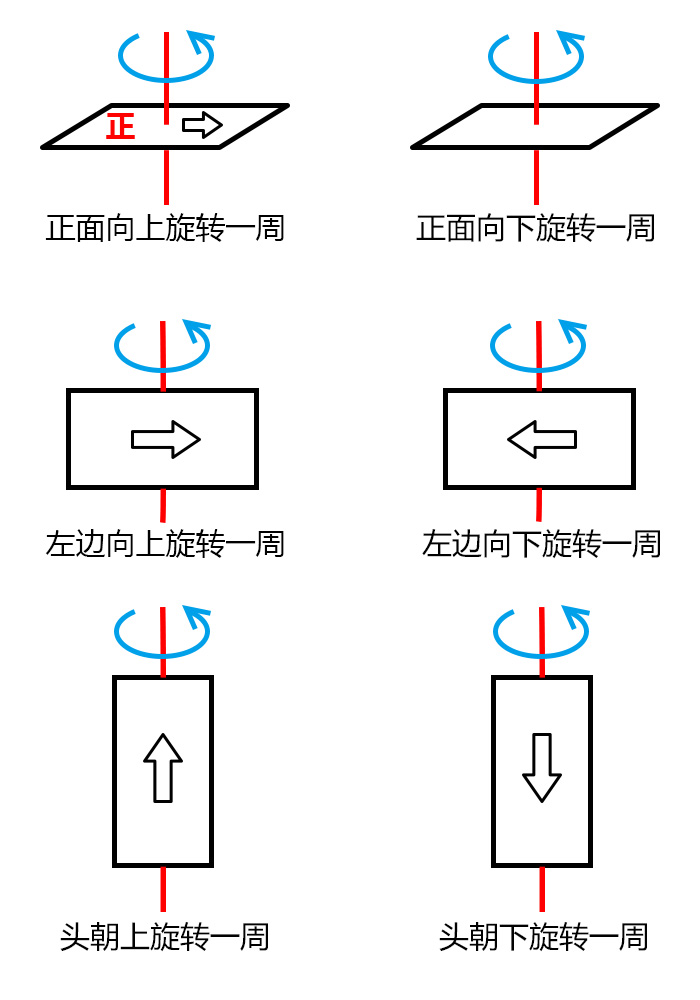
采用如图所示动作校准
在转的过程中,系统会不断记录罗盘传感器采集的数据,进度条右边的百分数会不断变化,如果数据没有变化,
请检查你的罗盘是否已经正确连接或罗盘芯片硬件是否正常。在进度条走到最右端之后,系统会出现一个提示框。如下图所示:

点击OK后给飞控重新上电,重启之后即完成罗盘校准。
注意:
当出现进度条完成100后归0继续开始校准,说明此时校准动作或者安装附近有干扰罗盘因,可以尝试继续转动多次直到校准完成或设置Fitness选项为Relaxed。

通过遥控器校准罗盘
① 用遥控器校准罗盘时,遥控器要先校准,飞机要安装蜂鸣器
② 为了启动罗盘校准,需要将遥控器油门向上打满,同时偏航YAW向右打满,保持这个动作2秒以上
③ 一旦听到蜂鸣器一秒一次的滴慢响,代表罗盘校准开始
④ 罗盘校准开始后,采用如图所示旋转飞机;
⑤ 当听到蜂鸣器连续的滴滴滴响时,代表罗盘校准成功,重启飞控后生效
注意:
① 校准失败时,飞机自动重新启动校准
② 取消罗盘校准,可以保持油门向上打满,同时偏航yaw向左打满2秒以上
③ 如果多次校准不成功时,可以用遥控器取消罗盘校准,通过地面站来校准罗盘
飞行模式设置
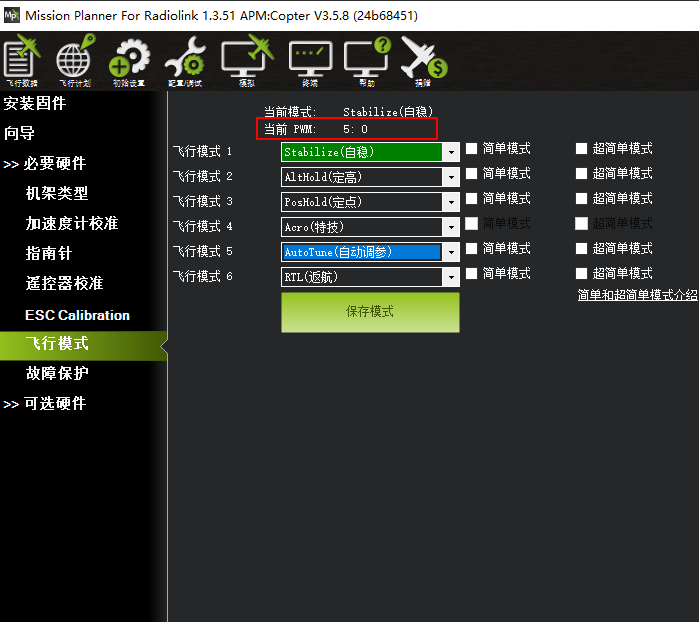
Mini Pix有多种可飞行模式可以选择,但一般只能设置六种,加上CH7,CH8的辅助,最多也就八种。这需要遥控器设置,以下以为乐迪AT9S为例,首先飞控连接接收机,遥控器与接收机对码,之后连接MP与飞控,随后点击初始设置->必要硬件->飞行模式选择,就会弹出如下的飞行模式配置界面

配置界面中,六个飞行模式对应的PWM值,是否开启简单模式,超简单模式都一目了然,模式的选择只需要在下拉框中选择即可。一般第一个设置为stabilize(自稳模式),其它5个请根据自己遥控习惯自行配置,但有一个原则,要保证你的模式切换开关随时能切换Stabilize(自稳模式)上。
下面进行遥控器的设置:
(1)打开遥控器
(2)再次按Mode键,进入高级菜单,按Push键选择姿态选择,进入姿态设置页面
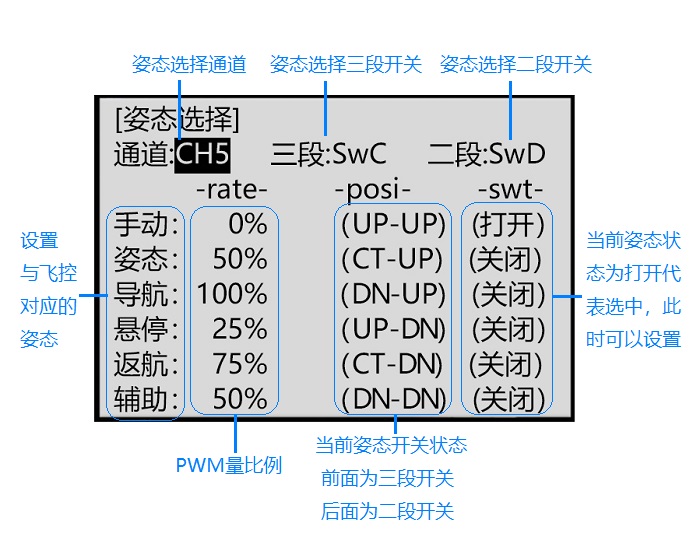
(3)在MP飞行模式中设置飞行模式1为stabilize(自稳),设置遥控器姿态页面第一个
① 首先查看第一个姿态状态是否打开,拨动开关到对应的位置到打开状态,
② 拨动拨盘到姿态名称,按Push选中后,选择到自稳,
③ 查看MP飞行模式当前PWM值如图
设置遥控器PWM量比例,拨盘选中PWM量比例值选项,按Push选中后,拨动调整数据大小,可以跟随看到如图MP中当前PMW值数据跟随变化,每种模式有其对应的PWM值,当PWM值在这个范围内,当前模式就是这个范围对应的模式,选中的模式也会变为深绿色,调整遥控器PWM量比例,让当前PWM值在模式限定范围中间,这样一种模式就设置好,模式2,模式3跟随这样设置
(4)模式4开始需要二段开关的配合,拨动开关到遥控对应的模式下,以步骤3同样方式设置即可
(5)请在查看简单模式和超简单模式介绍,之后可以在模式中选择是否启动简单模式或者超简单模式
飞行模式介绍
自稳模式
① 飞手用roll与pitch操作控制飞行器的倾斜角度。当飞手松开roll与pitch摇杆时,飞行器将会自动水平。
② 在有风的环境中,飞手需要不断的修正roll与pitch以让模型定点停留。
③ 飞手用yaw操作控制转向速率。当飞手松开yaw摇杆时,飞行器将会保持它的朝向不变。
④ 飞手的油门输入控制马达的平均转速,这意味着这如果想保持高度,需要不断的修正油门。
⑤ 油门输入会根据模型的倾斜角度自动调整(比如在模型倾斜过大的时候会自动增大油门),以弥补飞手操作飞行器倾斜所带来的高度变化。
特技模式
① 特技模式是仅基于速率控制的模式。
② 特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。
③ 在特技模式下飞行,就像是不装飞控的遥控直升机一样,需要持续不断的手工摇杆操作。
④ 此模式试用与翻滚,FPV等快速飞行
特技模式下的练习
ACRO_TRAINER设置
- 0禁用,这代表没有自动回平和角度限制,全手动控制
- 1自动回平,这代表当遥控器摇杆回中后,飞机会回到水平姿态,但是没有角度限制
- 2默认自动回平和角度限制,这代表飞机此时类似与自稳模式,拥有角度限制和回中回平功能
这个功能也可在7/8通道上控制开启关闭,设置功能为Acro Trainer,并使用一个3段开关控制,当开关通道值pwm<1200时候将开启上所述0的功能;当开关中间位置开启上所述1功能;当开关通道值pwm>1800时候将开启上所述2功能,当使用2段开关时,此时只能控制开启0或者2功能开启

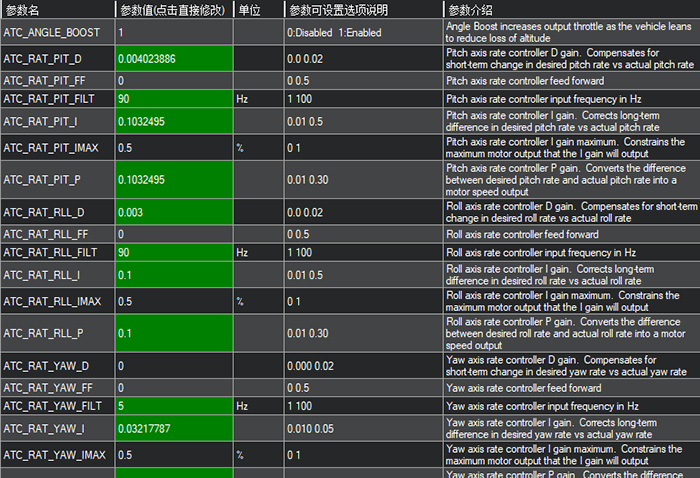
参数调整
ACRO_RP_P控制横滚和俯仰轴的旋转速度,默认情况下4.5,代表200度 /秒的旋转速率。更高的值会导致更高的旋转速度,低将更低的旋转速率。
ACRO_YAW_P控制偏航轴的旋转速度。默认情况下4.5,像横滚和俯仰,代表200度 /秒的旋转速率。
ACRO_RP_EXPO横滚和俯仰轴的指数变化数值,数值越大,代表你摇杆量越大时候速率越快
ACRO_Y_EXPO偏航轴的指数变化数值,数值越大,代表摇杆量越大时候速率越快
定高模式
在高度保持模式(简称定高)模式下,主板会自动控制油门,从而保持高度不变。Roll、Pitch和yaw的操作与自稳模式一样。都是直接控制飞机的转动角度和朝向。
自动高度保持是多种飞行模式(Loiter, Sport等)的一种,所以这里的信息也适用于这些模式。
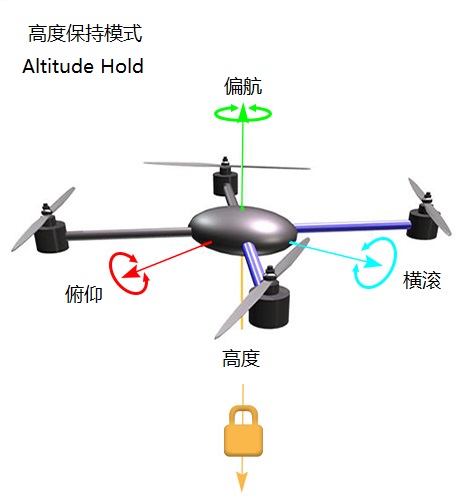
警告!飞控使用气压高度计测试结果作为高度基准。如果在飞行区域的气压出现变化,飞行器的飞行高度将会受气压变化的影响而不准确,飞行高度就不是实际的高度(除非另外安装了超声波测距,并且飞行高度小于20英尺)。26尺以下使用超声波测距会向飞行器提供更精确的飞行高度。
控制
可以通过油门杆控制飞行器上升和下降的速率。
① 当油门保持中挡(在40%-60%的地方),飞行高度不变。
② 超出这个范围,飞行器会不同程度的(由油门控制)上下浮动。上升和下降最大值是2.5m/s。最大值由飞行参数PILOT_VELZ_MAX设定。
起飞
当油门中点以上才能起飞,当达到起飞油门时,听见电机转速一个降速,此时提醒,油门达到起飞油门,当再继续推高油门,飞机就能起飞
降落
当定高模式降落,此时飞机降落,电机转速不会马上降低,此时不要马上上锁,有可能会导致飞机的翻转坠毁,此时应该等待飞机检测降落,电机转速降低之后再加锁
自动模式
在自主(自动)模式,飞行器将会按照任务脚本飞行,需预先编写并储存在自动驾驶仪上,包含自主导航航点,命令,事件。
自动模式可以让飞行器按照内部的任务脚本控制它的动作。任务脚本可以是一组航点,也可以是非常复杂的动作如:起飞、旋转X次、照相等。
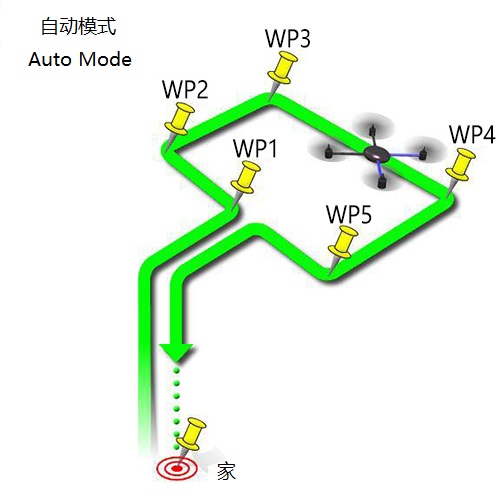
自动模式依赖于GPS,因为任务脚本依靠GPS获得位置信息,所以在解锁和起飞之前必须让GPS先定位。始终确保在自动驾驶仪和GPS模块上的LED灯表示的是GPS已完成定位:
- Mini Pix上的指示LED绿色。
- GPS+罗盘模块上的LED闪烁。
警告:在自动模式下,飞控主要使用测量空气压力的气压计决定高度(“压力高度”),并且如果在你的飞行区域气压改变,飞行器会随着气压而不是真实高度去改变高度(除非你安装并启用了声呐在离地6米以内飞行)。
在地面和在空中使用自动模式
有两种方法进入自动模式:在空中或者在地面上。如果你要从地面使用自动模式起飞,有个特殊的安全装置防止任务脚本执行,直到你解锁然后首次抬高油门。这是为了防止在不小心碰到模式开关时你的飞行器就起飞了。从地面使用自动模式起飞时,你最近一次的定高油门值作为油门控制的基准。一旦飞行器起飞就会飞向第一个目标高度,然后开始执行之后的任务脚本。
当你已经在空中的时候切换到自动模式,会使你的飞行器前往第一个目标高度,然后开始执行当前的任务脚本。
结束任务
任务脚本完成之后,飞行器不会飞回家,它只会悬停在最后的脚本所在位置,直到你通过模式开关重新获得控制。如果你想要你的飞行器飞回到家,你可以添加一个RTL(回家)命令结束你当前的任务脚本。如果你想要手动降落然后锁定电机(比预编程的自动降落命令更好),你必须切换到自稳模式。
记住,当使用RTL时,飞行器将返回家的位置(在GPS定位之后飞行器解锁时的位置),所以当你使用自动模式的时候,选择一个你希望飞行器返回的位置(没有障碍物并且远离人群)来解锁非常重要。警告:重点要了解家的位置始终使用的是你的飞行器解锁时的实际位置!
在任务脚本最后位置的RTL或是自动降落会强制降落然后停止电机。你不能在自动模式手动降落,除非已配置以上两个选项之一,因为油门摇杆控制高度,并不是直接控制电机。
定点模式
当打开时,定点模式会自动试图保持当前位置、指向、高度。要实现良好的留待性能,GPS位置良好、罗盘上低电磁干扰、低振动都是非常重要的。
控制
飞手可以通过控制摇杆或水平或垂直地控制飞行器的位置。
① 水平位置可以通过Roll和Pitch控制摇杆调整,默认最大倾斜角度为45度(角度可以通过ANGLE_MAX参数调整)。当飞手松开摇杆,飞行器会向后倾斜,使载具停下来。
② 高度可以通过油门控制摇杆来控制,如同定高模式
③ 指向可以通过Yaw控制摇杆来设定。
④ 你可以在定点模式解锁,但是必须要GPS获得3D锁定并且HDOP(精度可以在地面站首页查看)降至2.0或更低。
调整定点刹车
- 最大刹车角度可以通过PHLD_BRAKE_ANGLE参数设定(如:3000=载具会向后倾斜30度)
- 载具向后至最大角度的速度可以通过PHLD_BRAKE_RATE参数设定(如:8=以每秒8度向后旋转)
返航模式
当切换到返航模式时,飞行器会返回家的位置。默认情况下,在返航之前,飞行器会首先飞到至少15米的高度,或者,如果当前高度更高,就会保持当前高度。
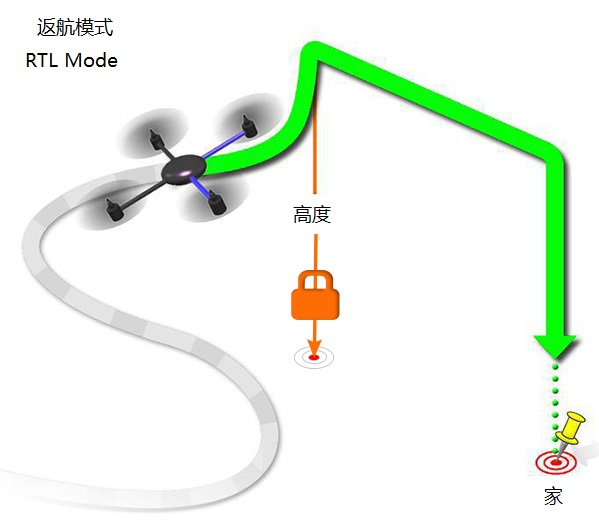
返航是依 赖于GPS的动作,因此在试图使用这个模式之前,完成GPS定位是必不可少的。返航将命令飞行器回到家位置,换句话说就是它会返回解锁时的位置。因此,家的位置始终应该是飞行器的GPS实际起飞位置,没有障碍物并且远离人群。
① RTL_ALT: 飞行器返返航之前的最低高度。
② 设置为0以当前高度返回。
③ 可以设置的返回高度在1到8000厘米之间。
④ 默认返回的高度是15米(1500)
⑤ RTL_ALT_FINAL: 在返航的最终阶段或是完成一个任务后,飞行器将会到达的高度。
⑥ 设置为0飞行器会自动着陆。
⑦ 最终返回高度可以从0至1000厘米间调整。
⑧ RTL_LOIT_TIME: 在最终下降之前在家的位置上方悬停的时间,以毫秒为单位。
⑨ 悬停时间可以从0至60000毫秒间调整。
⑩ WP_YAW_BEHAVIOR: 设置自动驾驶仪在任务和返航时如何控制“Yaw”。
⑪ 0 = 永不改变yaw。
⑫ 1 = 机头朝着下一个航点,或是对于返航,机头朝着家。
⑬ 2 = 机头背对下一个航点,或是对于返航,机头背对家。
⑭ LAND_SPEED: 最终着陆阶段的下降速度,以厘米每秒为单位。
⑮ 降落的速度可调范围为20至200厘米每秒。
简单和超简单模式
“简单”模式和“超级简单”模式用于与稳定、运动、飘移、降落这些飞行模式结合使用。
① 这两个模式可以让飞手从自己的视角控制飞行器,无论飞行器正面临着哪一个方向。
② 可用于对于还没学会根据模型方向调整roll和pitch的新手,或是飞行器飞的太远了看不清它的头的朝向。
③ 简单模式可以让你用起飞时的头的方向控制飞行器,仅需要较好的罗盘指向。
④ 超简单模式可以让你以飞行器朝向家
⑤ 解锁位置的方向控制飞行器,但需要较好的GPS定位。
⑥ 这两个模式可以分配到某个飞行模式的开关位上,也可以通过通道7/通道8进行开关。
简单模式
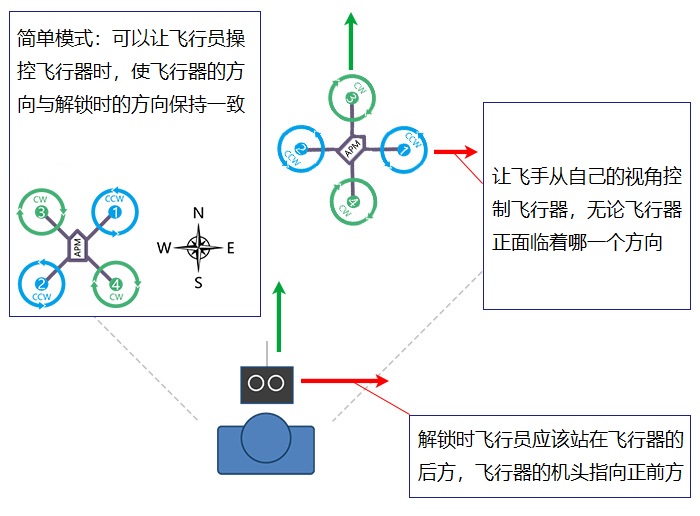
这个模式可以让你飞飞行器的时候,就像它一直是它解锁时的方向一样,不用管它现在转到了什么方向。如果你向前推pitch摇杆,飞行器就会飞离你,向后推pitch摇杆,飞行器就会朝家的方向飞回来。你甚至可以操作yaw任意旋转飞行器,但是用摇杆控制飞行器移动时是和起飞时一样的。
通常,解锁时你应该站在模型的后面,模型的机头指向正前方。在飞行中应保持模型在起飞位置的前面,因为如果它飞到了你身后,你就会感觉所有操控都反了。如上所述,在飞行器飞得太远了看不清头的朝向的紧急情况下,简单模式也是非常有用的。
超简单模式
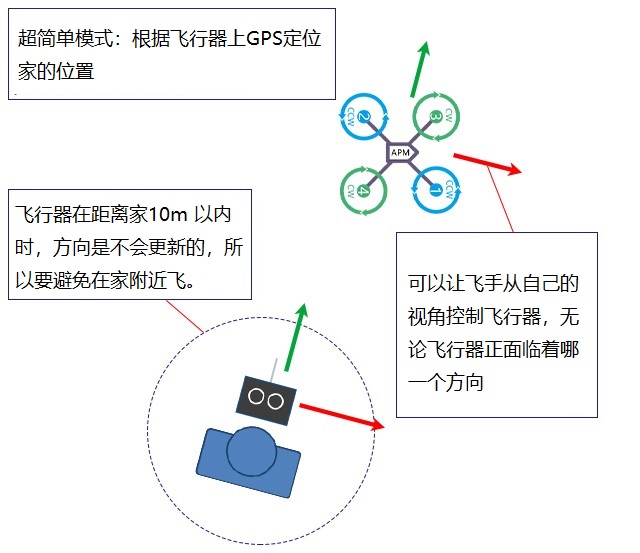
超简单模式和简单模式是基本相同的,除了它用的是模型的位置与家的位置相关联,不是用的模型最初解锁时的头的方向。这就是说不用管模型在哪,也不用管模型朝向哪,只要向后拉pitch就会让飞行器朝家的方向飞。
相较简单模式的优点就在于即使飞行器飞到了飞手或是家的后面,飞手还可以用自己的视角来控制。
如果向右拉满roll,模型就以飞手为中心顺时针绕圈飞(尽管因为“时滞每圈半径都有可能会增长一点)。
缺点是这个模式需要GPS定位,所以你要确保在起飞之前GPS已经定位。
模型在家10m以内时,方向是不会更新的,所以要避免在家附近飞。
在起飞时要确保控制是正确的,和简单模式一样,你应该在解锁时站在模型后面,飞手和模型所朝方向也应是一样的。
更多飞行模式
引导模式 Guided Mode
留待模式 Loiter Mode
绕圈模式 Circle Mode
飘移模式 Drift Mode
运动模式Sport Mode
翻转模式 Flip
自动调参 AutoTune
降落模式 Land
制动模式 Break
抛飞模式 Throw
ADSB壁障模式 Avoid_ADSB
无GPS引导模式 Guided_NoGPS
具体详细介绍可以查看官网
http://ardupilot.org/copter/docs/flight-modes.html
http://www.ncnynl.com/archives/201608/417.html
失控保护
普通失控保护
Mini Pix的失控保护是通过故障保护菜单配置的,进入故障保护菜单时会出现一个提示框,提醒你确保目前未在
飞行中,如下图所示:
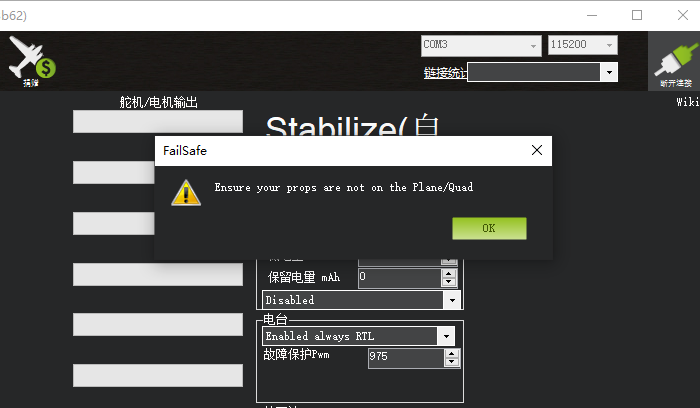
点击OK后进入设置界面:
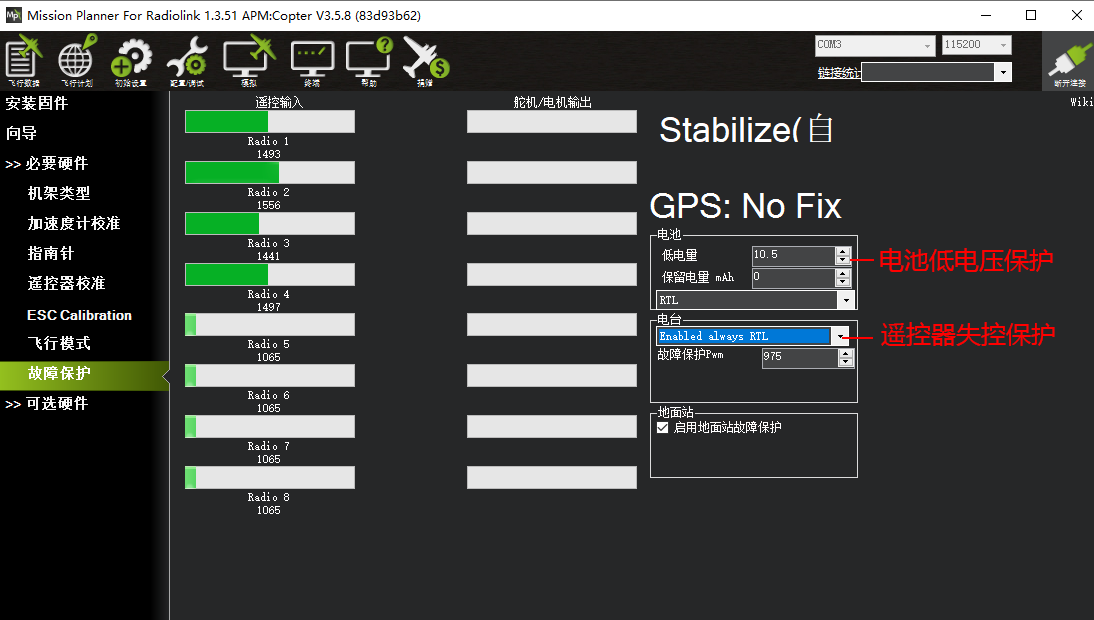
触发Mini Pix失控保护的条件有油门PWM,电池电压(需电流计)等可选,当达到触发条件,比如油门PWM值低于设定的值或者电池低于设定值以后,就可以启动失控保护选项了,失控保护选项有RTL(返航),继续任务,LAND(着陆)等可选。
① 设定电池失控保护
根据飞机耗电,电池大小,飞行距离设定保护电压,当低于这个电压后,能有足够电池能让飞机返航,设置低电量值(这个值根据电池大小设置,当你进行远距离飞行,请设置在单节3.8V,电压值3.8*S数,3S电池就为3.8*3=11.4V;当近距离则可以设置单节3.6V),设定动作为RTL(返航)即可
② 设定电台失控保护即油门失控保护
设定动作为RTL(返航),设定故障保护PWM(一般不需要更改)
设置遥控器上失控保护设置,因为我们设置在油门低于975后启动故障保护,所以我们要设置油门失控值,油门最低,拨动遥控器油门微调按钮,查看故障保护中的遥控器输入3通道数值,让其值比975小于10以上,按Mode键进入基础菜单,选择失控保护,按Push选中进入,选择3:油门,拨动转盘选择F/S后,按下Push键,出现数字值即设置成功,之后记得拨动微调按钮还原
当油门故障保护触发,会出现以下情况之一:
- 电机上锁--如果在自稳模式或者特技模式,且油门为0
- 返航--如果GPS已锁定,离家的位置至少2米
- 降落--如果GPS未锁定或离家2米内触发故障保护。
- 继续执行任务--如果在自动模式下,且故障保护选项为Enabled_continue_in_auto_mode。
- 如果故障保护清除(油门在975以上)飞行器将保持在当前飞行模式。 它不会自动地返回故障保护触发之前的飞行模式。 这意味着,如果以自稳模式飞行,故障安全模式被触发,导致飞行模式更改为RTL或,如果您重新控制飞行器,你需要飞行模式开关切换到另一位置,然后再切换回自稳模式。
③ 设定遥控器姿态失控保护
设定此种保护前提,在飞行模式设置中有失控保护的模式
打开遥控器,拨动设置的开关到返航模式或你想设定的失控保护模式,按Mode进入基础菜单,选中失控保护进入,按Push选中5:姿态,拨动选择F/S,按住Push,下方数字出现变化即可。验证可以打开地面站连接,关控查看MP变为RTL即成功
EKF故障失控保护
EKF故障失控保护集成了罗盘,GPS两种故障,此种故障失控保护默认为降落
参数名 意义
FS_EKF_ACTION 控制失控保护执行动作,默认为1,可以修改为2,在飞行中当罗盘过大的降落都是此失控保护导致
FS_EKF_THRESH 失控保护罗盘阈值,当干扰超过此值为失控
硬件安装
首先你要拥有一个飞行器,这里我们以X型四轴为例,在你拥有了一个完整安装好的多轴飞行器后,请按照以下步骤来安装你的Mini Pix。
① 在飞行器上安装Mini Pix,安装固定飞控在机架中心位置,并确保安装位置水平
② 已经加载固件之后,连接MP,进行之前几步校准你的飞行器
③ 按下安全开关,进行解锁,如解锁正常,安装好浆后进行正常飞行;如解锁不正常,查找设置校准问题,进行解决
④ 校准电调(首次飞行),请拆下浆进行
安装Mini Pix
尽可能在靠近载具重心的位置,使用提供的泡棉安装Mini Pix。确保控制板的箭头指向前方。
当使用有带有罗盘的GPS,注意GPS安装指示方向要与飞控机架安装方向一致
当出现无法默认箭头指向安装,可以根据安装方向进行参数修改
具体修改参数
AHRS_ORIENTATION
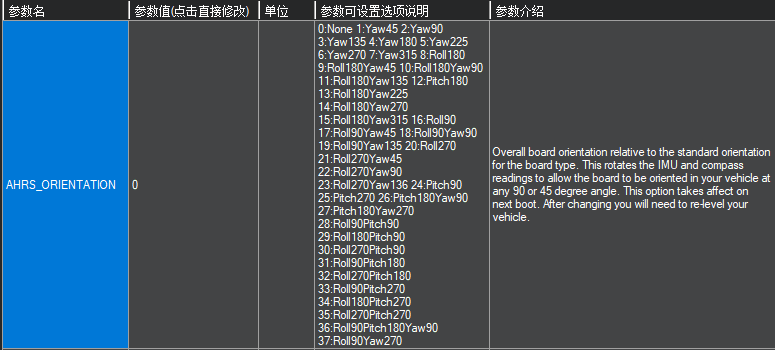
根据飞控与机头变化量,选择你需要旋转的方向,度数,选择参数对应选项值,写入参数保存,重启之后,地面站首页测试飞控动作是否正确
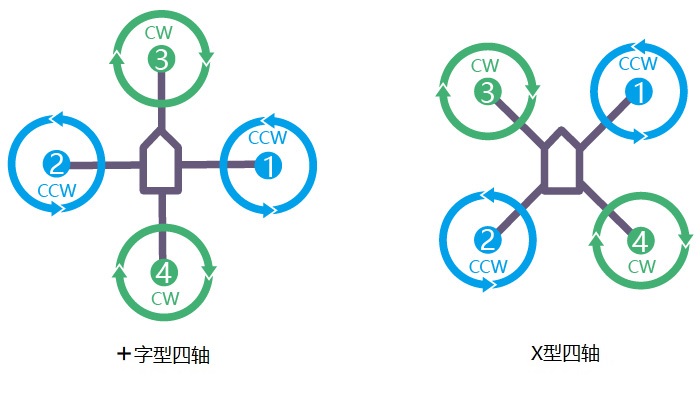
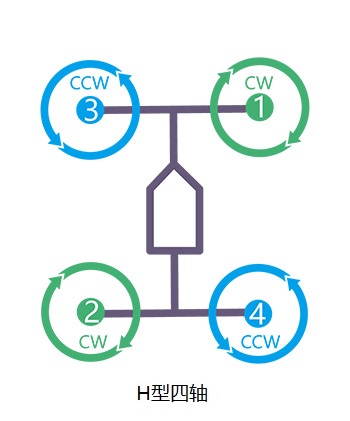
电机转向选择
绿色CW顺时针转,蓝色CCW逆时针转

机架安装电机转动方向图
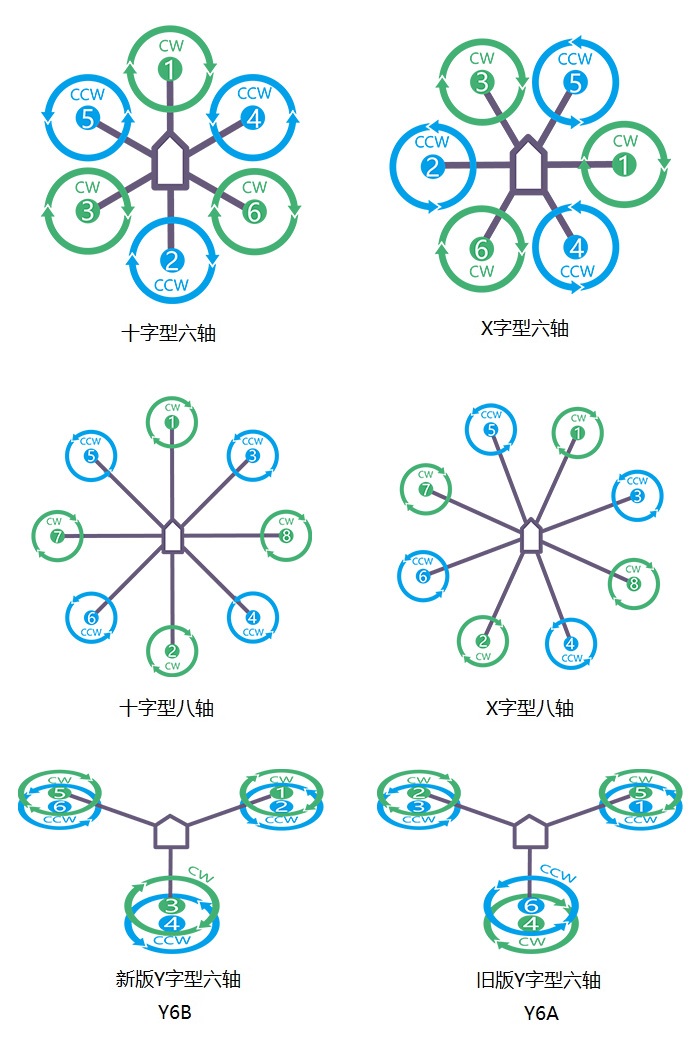
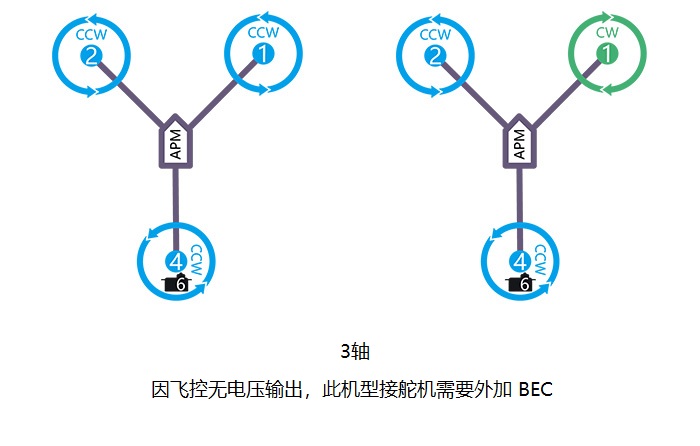
注意因飞控无电压输出,此机型接舵机需要外加BEC模块插针给舵机供电
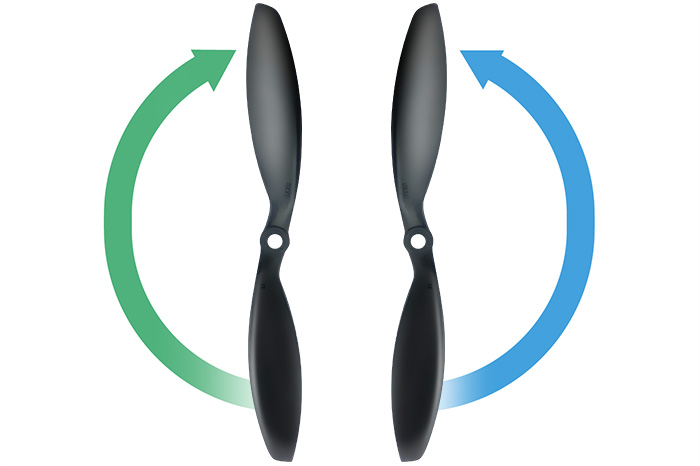
桨叶安装
顺时针方向(称为反桨)和逆时针(称为正桨)。推进器螺旋桨通常标有P。然而并非所有的螺旋桨被标记和这两种类型通常可以在任一旋转方向。因此,按照如下桨的形状来判断是比较可靠的。你可以参考这些特征,正确的识别桨的方向。
配件连接
接收机模块:用3pin 舵机接口连接至飞控RC IN/RSSI端口
蜂鸣器安全开关模式:用5pin GH插线连接至飞控SAFETY/BUZZER端口
电源模块 :用6pin GH插线连接电流计模块至POWER端口。
GPS+罗盘 :用6pin GH插线连接至GPS/I2C端口,注意安装方向与飞控一致
使用电流计设置

设置电池监测器开启
- 监控器:4:电池及电压
- 传感器:0:Other
- APM版本:4:The Cube or Pixhawk
关闭电池检测器设置
当设置开启后,请断开飞控连接,重新给飞控上电,之后再打开此界面,输入测量电池电压,当2电池电压(计算过)框中出现与输入测量值一样电压,并且不再跳动代表设置正常
注意:当设置不准确后,可能出现无法解锁,或者解锁后,蜂鸣器滴滴快速响的情况,此时代表电源莫设置错误,请重新正确设置,还有出现一直故障保护情况,此时可能是开启了电池低压保护,电池监测不准确
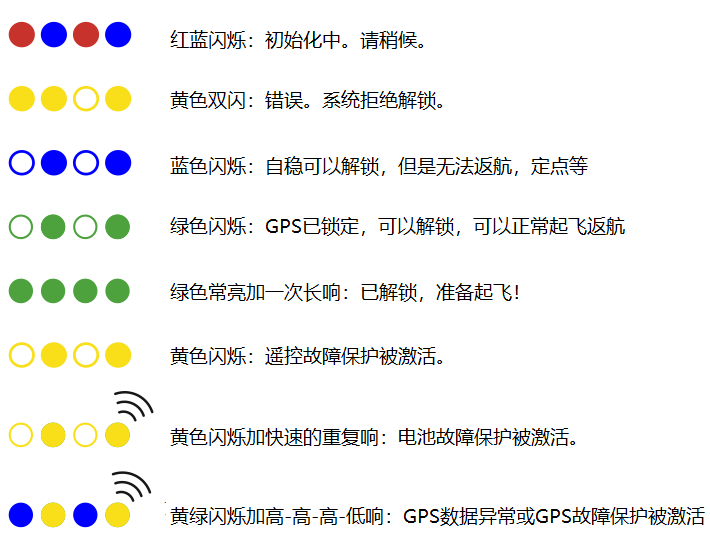
LED指示
飞控状态指示灯
LED飞控状态指示灯含义
安全开关指示灯
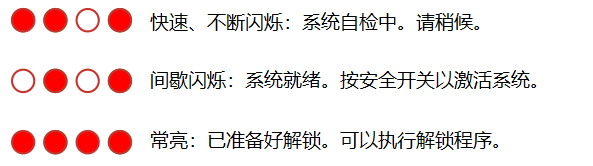
解锁和上锁
在连接好安全开关,蜂鸣器,当你的飞控状态指示灯为蓝色或者绿色就可以正常解锁了,当为黄色时候,你也可以执行解锁,查看故障原因。
解锁动作
- ① 长按安全开关,直到灯停止闪烁变为常亮,此时电机不在开始滴滴响
- ② 左边摇杆执行
 解锁动作(美国手mode2)
解锁动作(美国手mode2)
- ③ 保持解锁动作持续5秒
- ④ 当听到蜂鸣器长响和飞控指示灯常亮,此时代表解锁成功
-
注意:
① 当遥控器不为美国手时候,请执行解锁动作为,3通道最低,4通道最高,具体可以查看地面站,检查自己动作

检测如图所示Radio3的值为摇杆最低值,Radio4为摇杆最高值
② 当执行解锁动作出现蜂蜜器滴一声时,此时代表无法解锁,代表有故障,请飞控连接地面站查看解锁提示,并根据提示下面故障说明,解决故障
上锁动作
左边摇杆执行 动作保持5秒,当飞控指示灯闪烁,停转代表上锁正常
动作保持5秒,当飞控指示灯闪烁,停转代表上锁正常
注意:
① 当遥控器不为美国手时候,请执行3通道最低,4通道最低进行上锁动作
② 在定高,定点,留待等需要GPS辅助模式,降落后请等待螺旋桨转速降低后再执行上锁动作,否则可能带来飞机翻到可能性
关闭解锁怠速功能
如果你已经连接了电机电池进行解锁,在你解锁后电机就会怠速运转起来,以此提醒你飞控此时已处于工作状态,请注意安全。这个功能的安全意义非常大,但如果你不想使用这个功能,也可以关闭这个功能。
关闭方法:
修改如图所示3步骤值为0

无法解锁故障提示
解锁前飞控安全检查
① 验证遥控校准已执行。
② 验证加速度计校准已执行。
③ 验证罗盘是健康的并且能正常通讯。
④ 验证罗盘偏移量并不太大(即 开平方根(x^2+y^2+z^2) < 500)。
⑤ 验证实时罗盘校准或基于日志的校准已经执行,或是“COMPASS_LEARN”是开着的。
⑥ 验证适当的罗盘磁场强度: (小于530)
⑦ 验证气压计是健康的并且能正常通讯。
⑧ 如果是在启用了圆形围栏或是在悬停模式解锁,安全检查会确认:
⑨ 你的GPS已定位
⑩ GPS的hdop(水平精度因子)< 2.0 (可使用GPS_HDOP_GOOD参数配置)
地速小于50cm/s
⑪ 验证飞控板电压在4.5伏与5.5伏之间,用于APM 1或APM 2(PX4不可用)
⑫ 验证通道7和通道8没有设置控制同一个功能。
⑬ 如果遥控故障保护已激活,检查油门通道最小值不低于FS_THR_VALUE
⑭ 检查ANGLE_MAX参数(即在大多数模式下飞行器可以倾斜的最大角度)>10度并< 80度
⑮ 检查遥控的roll,pitch,油门和yaw的最小值小于1300且最大值大于1700
当验证问题无法通过就会出现无法解锁情况,具体表现为飞控状态指示灯为黄色闪烁,执行遥控器解锁动作,飞控的蜂鸣器滴滴提示
此时应连接地面站查看故障提示,连接后查看如下图界面
当出现红色字体,以PreArm开头的提示,这个就代表此时故障原因,具体可以查看下面提示翻译对比解决;
当没有红色字体显示时,可以执行遥控器解锁动作,此时会显示,或在消息栏中查看最上的一行文字;
当解决故障后,重新上电,飞控启动正常后会状态指示灯会变为蓝色闪烁,此时代表可以正常解锁;
当此时遥控器解锁出现滴滴提示,请按下安全开关后,再执行解锁动作。
解锁故障提示:
check firmware or FRAME_CLASS:请选择机架类型
3D Accel calibration needed:加速度计需要校准
safe switch:安全开关未关闭,长按至灯长亮
RC not calibrated :遥控器没有校准
Baro not healthy:气压计不健康
Alt disparity:气压计与惯性导航系统的高度不一致超过2米以上,这一消息通常是短暂的,当飞行控制器首次插入或如果它接收到一个硬的颠簸发生,如果没有消失,加速度计或许需要校准,或者气压计有故障
Compass not healthy : 罗盘不健康
Compass not calibrated : 罗盘没有校准
Compass offsets too high : 罗盘偏移值太大,也许是附近有金属或者其他干扰
Check mag field:所感测的磁场在该区域中的磁场是35%高于或低于预期值,需要重新校准罗盘
Compasses inconsistent : 内部和外部的罗盘指向不同的方向(从大于45度),通常是GPS外置罗盘放置位置不一致
GPS Glitch : GPS故障,当选择的飞行模式需要GPS定位,或者开启地理围栏,此时GPS没有定位会有此提示
Need 3D Fix :全球定位系统没有三维固定,当选择的飞行模式需要GPS定位,或者开启地理围栏,此时GPS没有定位会有此提示
Bad Velocity : 飞行器的速度(根据惯性导航系统)是50cm以上的,可能导致这包括飞行器实际移动或被抛起,
坏的加速度计校准,GPS更新在低于预期的5HZ
High GPS HDOP : GPS精度低于高于2.0,可以在首页查看GPS精度实时变化数据
INS not calibrated: 加速度计没有校准
Accels not healthy:加速度计不健康,可能硬件问题,可能发生在刷新固件没有重启
Accels inconsistent: 加速度计不一致超过1m/s/s
Gyros not healthy: 陀螺不正常,可能硬件问题,可能发生在刷新固件没有重启
Gyro cal failed: 陀螺仪校准未能捕捉偏移,这个由于启动校准时候移动了飞控,在红蓝闪烁就是校准时刻
Gyros inconsistent:陀螺不一致超过20deg/sec
Check Board Voltage:检查板上电压,应该在4.3V到5.8V之间,如果通过USB供电,请尝试更换端口或者线缆
Ch7&Ch8 Opt cannot be same:7/8通道不能设置一致
Check FS_THR_VALUE:3通道最低值太接近失控保护值
Check ANGLE_MAX: 控制飞控的最大倾斜角度设定在10度以下的angle_max参数(即1000)或80度以上(即8000)。
ACRO_BAL_ROLL/PITCH: acro_bal_roll参数高于自稳Roll P和/或acro_bal_pitch参数高于自稳Pitch P 值。
校准电调
手动首先确保,飞机连接正常,校准完成,能正常解锁,之后拆掉飞机的浆叶
① 把遥控器的油门通道打到最高,飞机上电,看见LED进行多色闪烁,断开电源
② 再次上电,不要动遥控器,等待30秒后,按住安全开关解锁,之后听见滴滴叫声
③ 把油门打到最下,听见滴滴叫声后,轻推油门,电机转动则校准正常,如没有,请重新来过
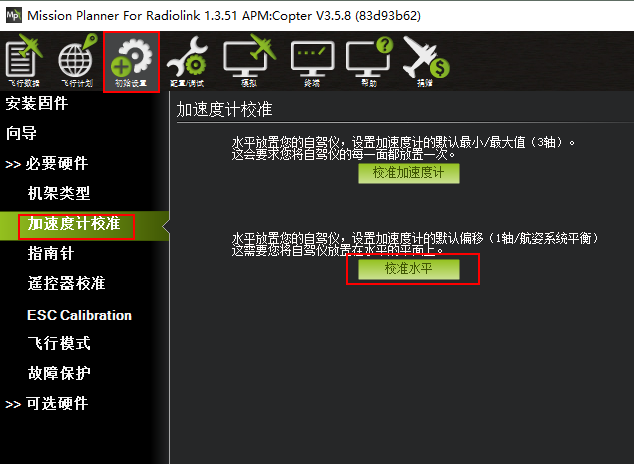
水平校准
当飞控在飞机上安装固定好,可能出现飞机放地面水平显示不平的现象如下图所示:
当飞机放置在水平地面站,红色水平线相对绿色地面不齐平,代表飞机水平不平,出现安装误差
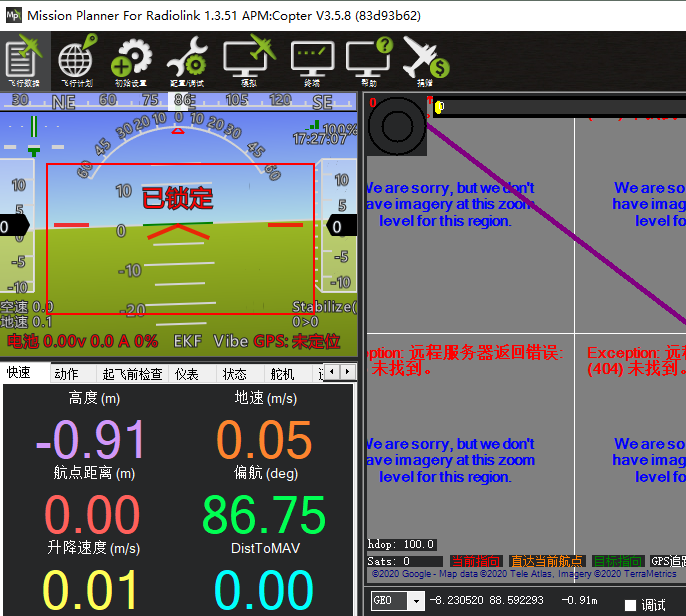
当出现此现象时候,请进行如下操作
进入加速度校准页面,点击校准水平,当飞控状态灯三色闪烁正在校准,校准完成后会恢复之前状态指示灯
地理围栏
这是一种安全保护机制,保护飞机不飞出你设定的范围,开启此机制会检测GPS是否定位,当没有定位无法解锁
设置步骤如下:
① 打开地理围栏页面
② 勾选启用

设置说明:
类型:
- Altitude 高度保护,超过这个高度执行保护动作
- Circle 圆形保护,以起飞点为圆心,设置半径大小画圆圈,超过这个范围执行保护动作
- Altitude and Circle 圆柱行保护,起飞点为圆心,设置半径,高度,围城的圆柱,超过这个范围执行保护动作
- Polygon 多边形保护,在飞行计划中地图绘制多边形后,最大84个点,超过这个绘制范围 执行保护动作
- Altitude and Polygon 高度与多边形保护,在多边形保护基础上增加高度保护
- Circle and Polygon 圆形与多边形保护,在多边形基础上增加圆形保护,这样限制范围就为绿色区域,当超过绿色区域执行保护
动作:
- Report Only 当超出限制区域,只地面站消息提示,不进行其他操作
- RTLor Land 返航或者降落

最大高度:保护限制最高飞行高度(10-1000m)
最大半径:保护限制最大飞行半径(30-10000m)
返航最低高度:返航高度(0-80m)
自动调参
自动调参功能可以自动调整Stabilize P和Rate P、Rate D的参数,从而得到更高的灵活性,也不会有大的超调。 通过在飞行中自通过不断的roll和pitch动作中来得到最佳的PID参数,所以在使用自动调参前必须切换至定高模式。
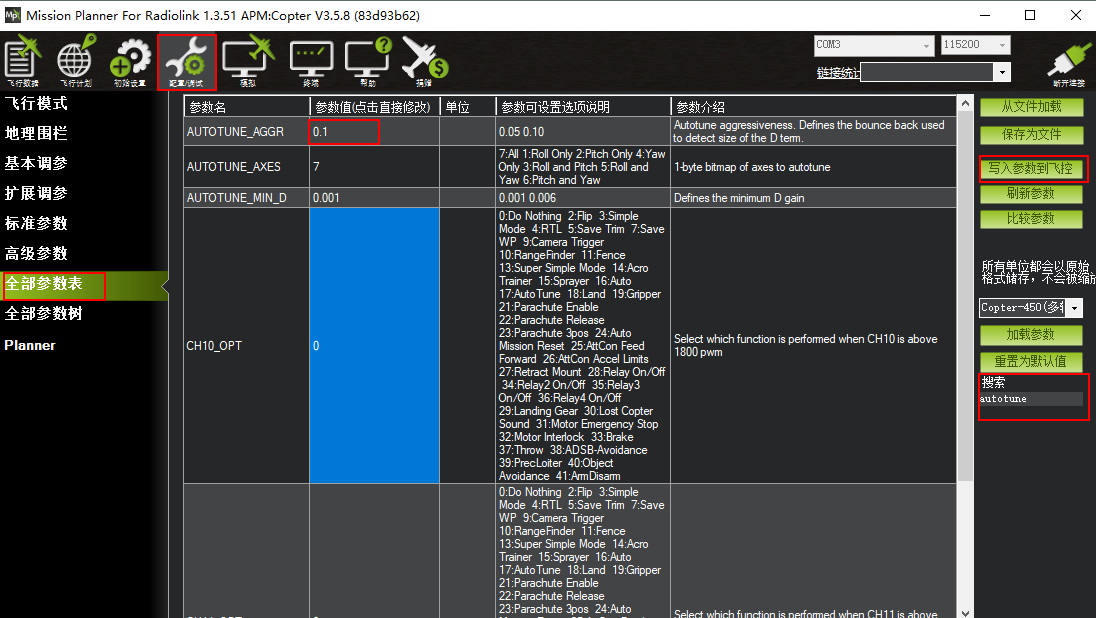
自动调参参数设置
因为默认自动调参为多个方向一起调整后才会保存参数,在电池电力不足的情况下,很难调整完成,针对这种情况,推荐使用单个方向调整,具体修改如下参数
AUTOTUNE_AXES
|
参数值
|
值含义
|
|
7
|
三个轴都调整
|
|
1
|
只调整ROLL(横滚)
|
|
2
|
只调整PITCH(俯仰)
|
|
4
|
只调整YAW(偏航)
|
|
3
|
调整ROLL和PITCH
|
|
5
|
调整ROLL和YAW
|
|
6
|
调整PITCH和YAW
|
如何使用自动调参
1. 把某一个飞行模式设定为定高模
2. 把通道7或者通道8设定为自动调参的开关或飞行模式中设置为自动调参

3. 在起飞时确保通道7或通道8处于低位
4. 在一个晴朗的天到一个开阔的场地进行试飞
5. 起飞然后在一个合适的高度切到定高模式
6. 将通道7/通道8拨至高位以开启自动调参模式:
- 此时你将看到飞机以20°左右来回要摆几分钟,然后在前后方向重复同样的过程。
- 如果飞机漂的过远,我们可以打杆让它飞回来(此时飞机用的是最初设置的PID参数)。 飞回来之后我们松开遥控器摇杆,自动调参将会继续进行。
- 如果我们想终止自动调参,我们只需要把通道7/通道8打回低位,此时自动调参将会终止并且切回最初的PID参数
7. 自动调参完成后,飞机将会切回最初的PID参数设置
8. 如果想测试自动调参得到的PID参数的飞行效果,我们需要把通道7/通道8先切回低位,再打到高位,此时使用的就是自动调参得到的PID参数
9. 如果想继续使用最初的PID参数设置,把通道7/通道8打到低位即可
10. 如果你觉得自动调参得到的PID参数飞行效果不错,我们在给飞机上锁的时候保持通道7/通道8高位,这样新的PID参数将会保持并且覆盖最初的PID参数。
如果你觉得自动调参得到的参数不太好,我们在给飞机上锁的时候保持通道7/通道8低位。 此时自动调参得到的参数就不会保存。
自动调参注意事项
① 目前为止,与自动调参有关的问题都与机架有关:飞控的减震棉太软或者机臂松动。
② 当你的电池飞行时间较短,或者飞行环境风大,空间较小,或者参数比较差,需要较长时间调整,可以修改参数进行一个轴一个轴的调整(V3.3版本之后固件支持)
③ 为了得到最佳的自动调参参数,我们要控制飞机在自动调参时的飞行速度。 当漂移过远之后注意拉回来,当我们操作时候,调整自动暂停,无人为控制介入时候启动
④ 请注意在自稳模式时,自动调参也可以启动。在启动自动调参之前,要确保飞机已经切到定高模式,要避免误碰。
参数设置
参数界面介绍
在MP地面站中,PIX的参数可以修改飞控一切设置,并且没有值范围限制,请不要在飞行中修改

界面右边栏目:
基本参数:提供遥控控制手感,爬升反应率简单参数调整
扩展调参:提供PID,7、8通道功能调整
标准参数:提供界面一些基本设置解锁检测项,日志,附加功能开启,通道功能等
高级参数:提供界面PID等一些高级功能设置
全部参数表:所有参数列表显示,参数名称,参数值,值单位,值范围和值选项,参数功能介绍
全部参数树:相关功能参数相近显示,一个功能展开后,功能相关参数显示
界面左边栏目:
加载:加载保存的参数文件
保存:参数以文件保存在电脑
写入参数:上传修改的参数到飞控,保存修改
刷新参数:显示最新修改后的参数
比较参数:可以对比保存文件中的参数与飞控现在显示的参数,点后选择参数文件后,显示不同项目值
重置为默认:重置所有参数为默认,当出现一些参数写入故障或者设置故障,推荐还原参数后再重新校准
搜索:输入参数名称,搜索对应参数,可以模糊搜索,输入参数名前缀即
参数修改
飞控所有设置都可以通过参数中来设置,所以知道怎么修改参数对于飞控使用很重要,进入全部参数界面后可以按以下步骤修改;
- ① 在搜索框输出你要修改参数名称
- ② 等待中间位置刷新显示搜索后参数
- ③ 在参数值框中点击选中后,输入你想修改的值
- ④ 点击右侧的写入参数,进行参数保存
选择服务器上的参数
针对个人普通用户参数设置麻烦问题,我们修改,添加了服务器下载参数,后期会慢慢增加一些飞行良好机架的参数供大家下载使用,当大家调整好参数时候也可以通过假如我们官方QQ群上传你的配置和飞控参数分享给大家使用
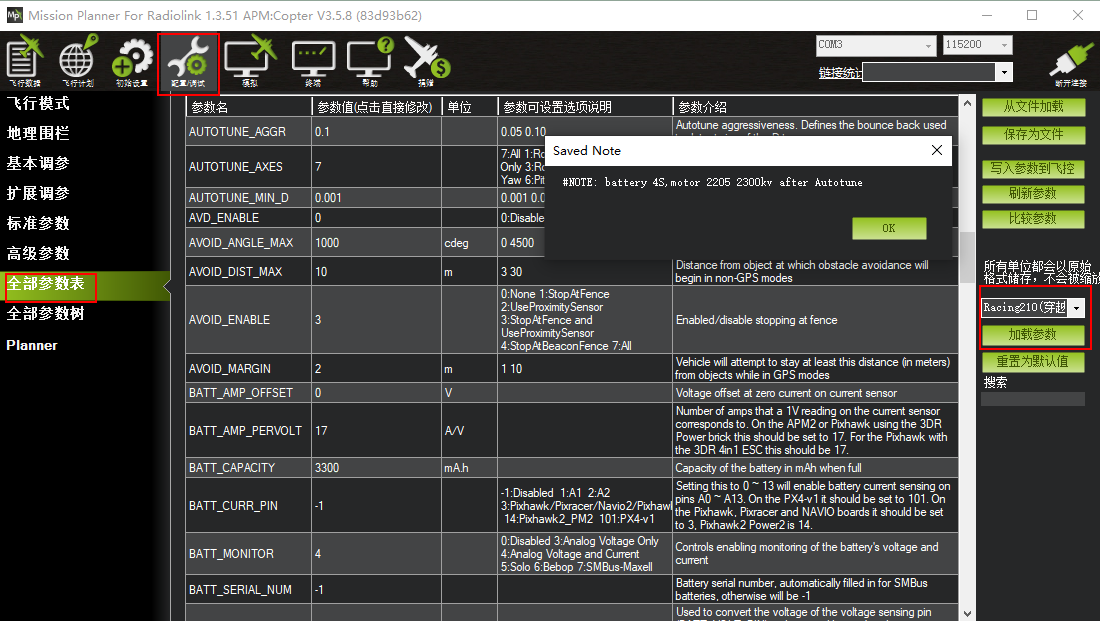
操作步骤如下:(使用乐迪地面站V1.3.49.6版本以及之后版本)
① 连接好飞控后,打开地面站配置调参
② 打开全部参数表界面
③ 点击右侧参数选择框下拉按钮,选择你相近机型后选中
④ 点击下部的加载参数
⑤ 弹出提示,注意查看此参数的配置说明
⑥ 点击OK后,查看参数对比列表,可以查看不一致的参数选项和值
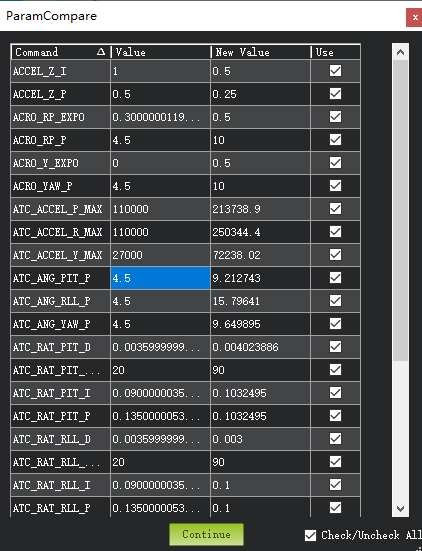
左边值代表飞控此时参数,右边值代表下载的新参数,勾选就代表下一步骤会修改此参数
⑦ 点击continue后,可能会有参数提示超出设置范围,你可以点击OK,之后可以看到修改后的参数值为绿色显示
⑧ 点击写入参数到飞控按钮保存设置到飞控板
此功能是为了方便大家寻找类似的解决参数更快调整好飞控,参数不一定适用,需要更进一步的手动调整,以下提供手动调整的文档,大家可以按照文档的手动更加进一步精细调整,期待大家飞行完美
穿越机调参指导文档下载
日志下载与查看
通过此方式下载飞行日志,进行问题分析,查看飞行轨迹等
通过地面站连接飞控,连接后进行如下图操作,进行日志下载

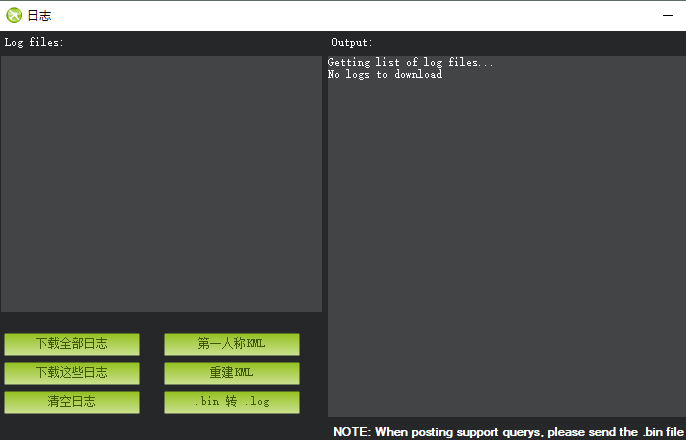
下载全部日志:下载全部所有的飞控日志
下载这些日志:下载选中的日志
通过下图步骤打开日志文件

参考资料
1. 日志查看
https://www.radiolink.com/minipix_log
2. 泡泡老师pix设置,遥控器设置,故障解决
http://www.moz8.com/thread-39886-1-1.html
3. 测量飞机震动情况
http://www.ncnynl.com/archives/201608/438.html
4. pix官方文档中文版本
http://www.ncnynl.com/archives/201608/393.html
5. ardupilot官方文档
http://ardupilot.org/copter/index.html
6. ardupilot官方论坛,可以反馈BUG或者查看故障
https://discuss.ardupilot.org/
版本说明
|
版本号
|
时间
|
修改
|
|
V1.0
|
2017.10.16
|
初次版本
|
|
V1.1
|
2017.10.17
|
添加水平校准和地理围栏
|
|
V1.1.1
|
2017.10.19
|
修改引脚定义错误
|
|
V1.2
|
2017.11.06
|
添加GPS罗盘校准和特技模式设置和无法解锁解决
|
|
V1.2.1
|
2017.11.23
|
添加修改参数说明
|
|
V1.2.2
|
2017.11.24
|
添加Y3机型连接说明
添加参数加载说明
|
|
V1.2.3
|
2018.3.14
|
修改地面站下载链接,添加飞控安装方向,自动调参选项参数
|
|
V1.2.4
|
2019.1.28
|
修改Net Framework下载链接
|
|
V1.2.5
|
2019.8.2
|
对调遥控校准跟校准位置、添加通过遥控器校准罗盘
|
|
V1.2.6
|
2019.9.11
|
添加向导界面的禁用说明
|
|
V1.2.7
|
2020.2.18
|
修改新版分电板的说明
|
|
V1.2.8
|
2020.10.27
|
修改新版分电板的说明
|




















")
")
























")
")
")







")










")
















































































































