
-


- 2023-05-23
- 2023-05-18
- 2022-07-06
- 2022-06-24
- 2022-06-23
- 2022-06-22
- 2022-06-21
- 2022-06-21
- 2022-06-17
- 2022-06-16
- 2022-06-15
-

- 2024-01-24
- 2024-03-28
- 2022-07-06
- 2022-07-09
- 2024-04-11
- 2022-07-07
-




-
-





")
")


























")
")
")








")










")








































乐迪飞控坦克车辆使用说明书
这里默认飞控已经完成刷车船固件、校准飞控、失控保护等操作(参考乐迪minipix车船使用说明书)。下面具体讲解坦克车辆的安装与调参,飞控使用CrossFlight。
尽可能在靠近载具重心的位置,使用提供的泡棉安装CrossFlight。确保控制板的箭头指向前方。


当使用带有罗盘的GPS,注意GPS安装指示方向要与飞控机架安装方向一致。
电机安装
左电机驱动信号线应连接到RC输出1,右电机驱动信号线应连接到RC输出3。
注意飞控不支持BEC输出,电机驱动的电源应外部供电,仅信号线与飞控连接。
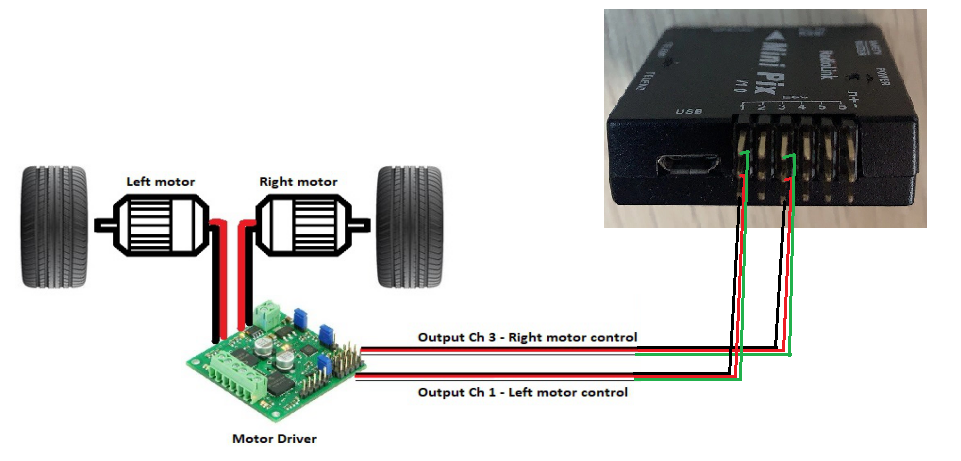

Servo输出设置
Servo输出的1通道设置左油门,3通道设置右油门,分别控制坦克的左电机和右电机。


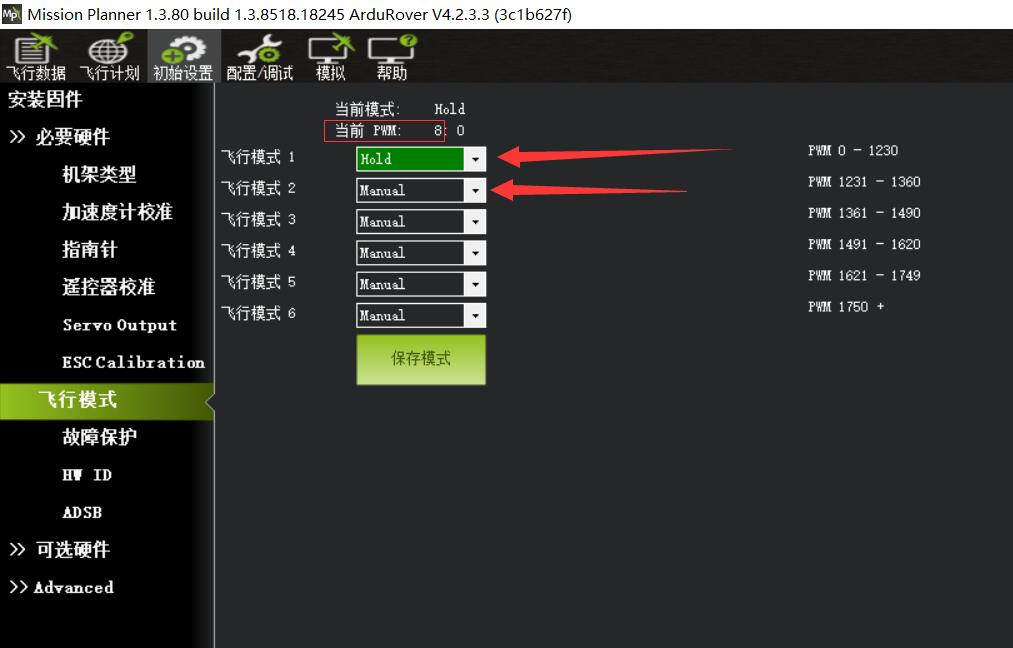
控制模式设置
这里使用CrossFlight飞控,控制模式设置Hold(停车模式)和Manual(手动模式),当前切换模式的通道为PWM 8通道,可以通过参数MODE_CH修改切换控制模式的通道。

解锁上锁
注意在没有校准电调前解锁,请断开电机驱动信号线。
在解锁之前,你通常应该等待飞行控制器上的LED变成闪烁蓝色(如果你只打算使用手动模式)或闪烁绿色(适用于所有其他模式)。如果LED从未变成蓝色或绿色,请参阅乐迪minipix车船使用说明书的LED指示和解锁及故障解决。
从遥控器操纵杆上解锁。确保车辆在停车, 手动模式,先将油门杆推至中点,然后将横滚转向摇杆完全打向右边,然后保持2秒,当飞控蓝灯或者绿灯长亮,则代表解锁成功。
从遥控器操纵杆上加锁。确保车辆在停车模式!!!,先将油门杆推至中点,然后将横滚摇杆完全打向左边,保持2秒,当飞控蓝灯或者绿灯闪烁,则代表加锁成功。
电调校准
校准电调之前,请先确保电调的信号线连接正常,遥控器已经校准完成,同时记得车的轮子不要接地,保持悬空,预防在校准电调过程中,误动摇杆,车子乱跑。
1)使能飞控上电自动解锁。
在MP上设置ARMING_REQUIRE 为0,如下图所示:
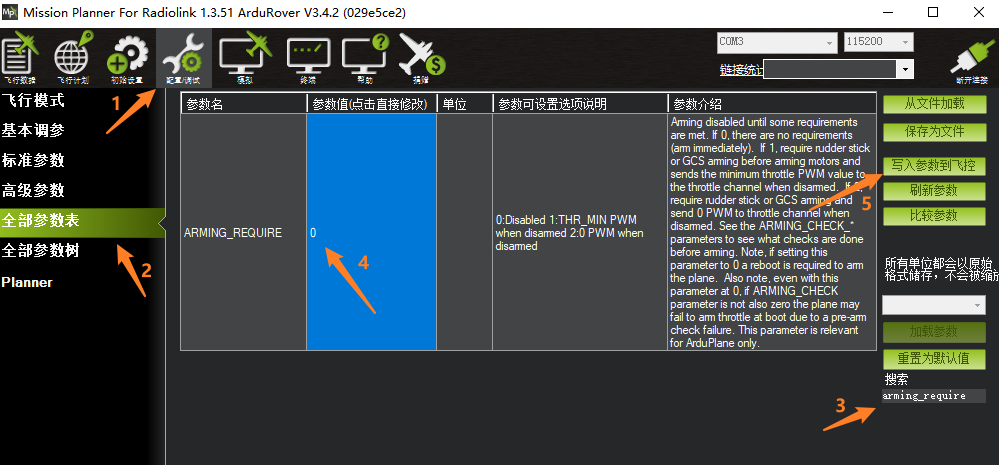

ARMING_REQUIRE为0:飞控上电初始化后,立刻自动解锁,不用人为解锁。
2)开始校准电调
断开飞控上的所有电源(电池、USB线),油门摇杆向前打满,然后插上电池,同时给电调和飞控供电。飞控启动完成后,飞控状态灯为蓝灯或者绿灯(GPS定位),这时应该听到电机发出滴滴的叫声,说明电调进入校准模式。然后把油门向后打满,这时应该听电调另一种滴滴的叫声。最后把油门摇杆回中,代表电调校准完成(不同电调,具体怎么校准,需要自己查看自己电调的校准教程)。轻推油门,电机转动则电调校准正常。如没有,请重新来过。
3)关闭飞控上电自动解锁。
在MP地面站把第1步设置的ARMING_REQUIRE 值还原成1,即关闭飞控上电自动解锁。
确认电机的正反向
若遥控器摇杆控制坦克前进后退,坦克履带转向错误,请设置参数
SERVO1_REVERSED=1(左电机)
SERVO3_REVERSED =1(右电机)
哪边履带转向错误,设置哪个参数。
水平校准
当飞控在坦克上安装固定好,可能出现坦克放地面水平显示不平的现象如下图所示:
当坦克放置在水平地面站,红色水平线相对绿色地面不齐平,代表坦克水平不平,出现安装误差。

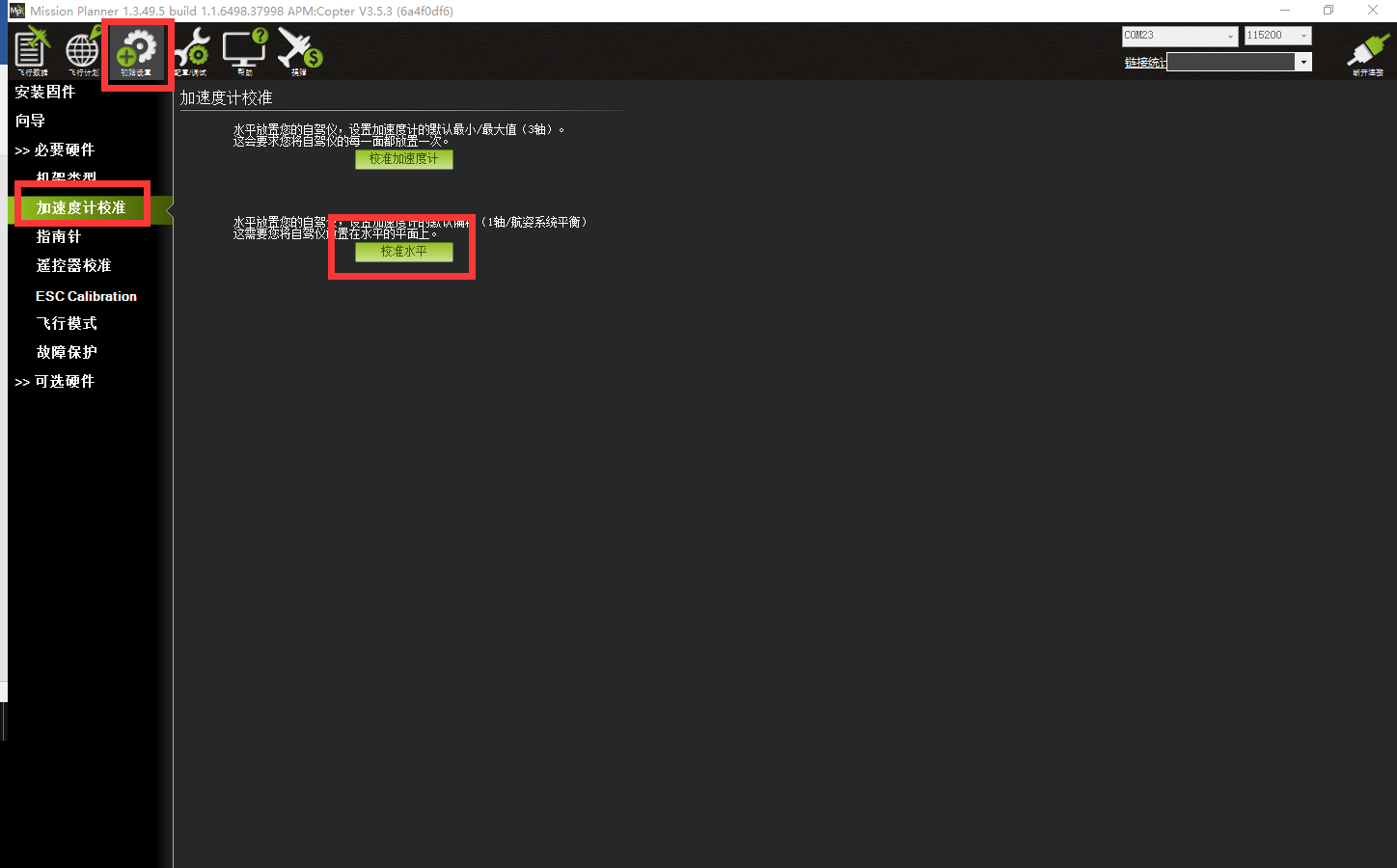
当出现此现象时候,请进行如下操作:
进入加速度校准页面,点击校准水平,当飞控状态灯三色闪烁正在校准,校准完成后会恢复之前状态指示灯

至此坦克车辆的安装和调参已完成,坦克应当可以正常遥控控制。若仍有问题不能解决,请参考文档乐迪minipix车船使用说明书和ardupilot官网教程。
参考资料
1.ardupilot官网
https://ardupilot.org/ardupilot/index.html
2.乐迪minipix车船使用说明书
https://radiolink.com/minipix_manual_download

