
-


- 2023-05-23
- 2023-05-18
- 2022-07-06
- 2022-06-24
- 2022-06-23
- 2022-06-22
- 2022-06-21
- 2022-06-21
- 2022-06-17
- 2022-06-16
- 2022-06-15
-

- 2024-01-24
- 2024-03-28
- 2022-07-06
- 2022-07-09
- 2024-04-11
- 2022-07-07
-




-
-





")
")


























")
")
")








")










")








































一、 接收机输出 PWM 信号(一个 PWM 对应一个通道)
遥控航模将遥控器上操作信号无线传输到接收机上,接收机连接控制舵机,电机控制器等执行设备,一个设备占用接收机一个通道,每个通道三根线分别是信号线,电源正极和负极。这个信号的格式为 PWM(pule width module),中文名为脉冲宽度调制。具体产品可参阅 https://www.radiolink.com/r7fg
1. 接收机输出通道 PWM 信号

2. PWM 范围
图中标示一个 PWM 信号在 1~2ms(ms:毫秒)之间变化也就是一个通道舵量变化,把 1ms 称之为小舵量,2ms 为大舵量,1.5ms 为中点,舵量除了用毫秒来表示舵量外还常用微秒(us)来表示,1~2ms 对应 1000~2000us,当用微秒来表示舵量时常省去 us 这个单位,比如中点我们就用 1500 表示而不再用 1500us.
3. 通道舵量
通道舵量即 PWM 值,其小舵量为 1000,中点为 1500,大舵量为 2000。飞控 Betaflight 和 pixhawk 地面站上遥控器通道大小就是用的 PWM 值来表示。
二、遥控器上通道舵量
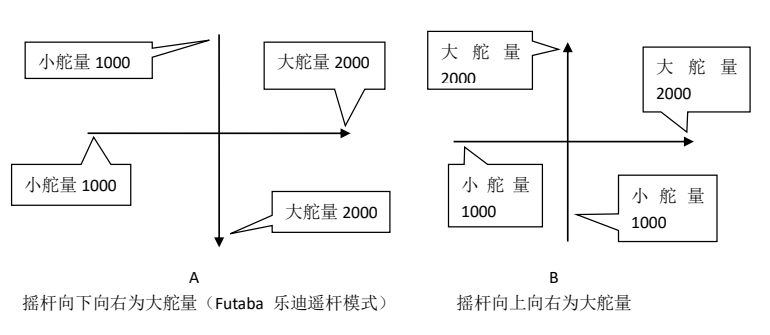
1. 摇杆舵量,横杆(副翼和方向)都是向右舵量增加,竖杆分两种情况,下图中 A 为向下舵量增加,B 为向上舵量增加。
2. 遥控器上舵量和数值关系
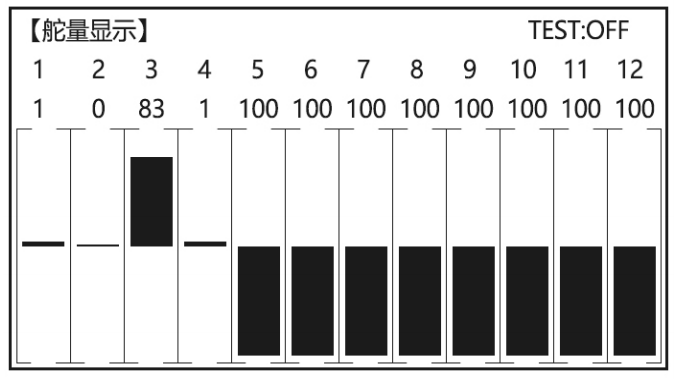
以上是乐迪遥控器舵量显示,上为小舵量,下为大舵量。
3. 开关旋钮的舵量
1) 开关舵量 开关内勾为大舵量,外推为小舵量。
2) 旋钮 顺时针为大舵量,逆时针为小舵量。

