
-


- 2023-05-23
- 2023-05-18
- 2022-07-06
- 2022-06-24
- 2022-06-23
- 2022-06-22
- 2022-06-21
- 2022-06-21
- 2022-06-17
- 2022-06-16
- 2022-06-15
-

- 2024-01-24
- 2024-03-28
- 2022-07-06
- 2022-07-09
- 2024-04-11
- 2022-07-07
-




-
-





")
")


























")
")
")








")










")








































一般来说宽频舵机的中立位置为1500us,高电平脉宽极限位置一般是1000us至2000us。PIXHAWK默认输出的信号脉宽中立位置是1500us,最小和最大值分别是1000us和2000us,与舵机一致,所以PIXHAWK使用宽频舵机无需另行设置,可以直接使用。
但是由于窄频舵机的中立位置是750us,高电平极限位置是450us至1050us(不同舵机参数可能不一样), 与PIXHAWK默认输出的信号脉宽不吻合,舵机不能识别PIX输出的信号导致窄频舵机无法正常使用。这时需要设置PIX输出的参数才可以使用。
警告:目前PIXHAWK和Mini Pix只有刷直升机固件才支持窄频舵机,同时窄频只能设置在第4通道。
下面以直升机尾舵的窄频舵机为例。具体步骤如下。
① 地面站连接PIX飞控
② 软件设置
③ 点击全部参数表
④ 在全部参数表界面右下角的搜索框里输入SERVO4
⑤ 将SERVO4_MAX默认的值2000改为1050,SERVO4_MIN默认值1000改为450,SERVO_TRIM改为750,修改过程中会提示超出了范围,这个不需要理会,点击yes即可
⑥ 点击右上角的写入参数到飞控。
⑦ 最后重启PIXHAWK,在“硬件配置”选择“必要硬件”,在故障保护里面看修改是否成功,如下图所示
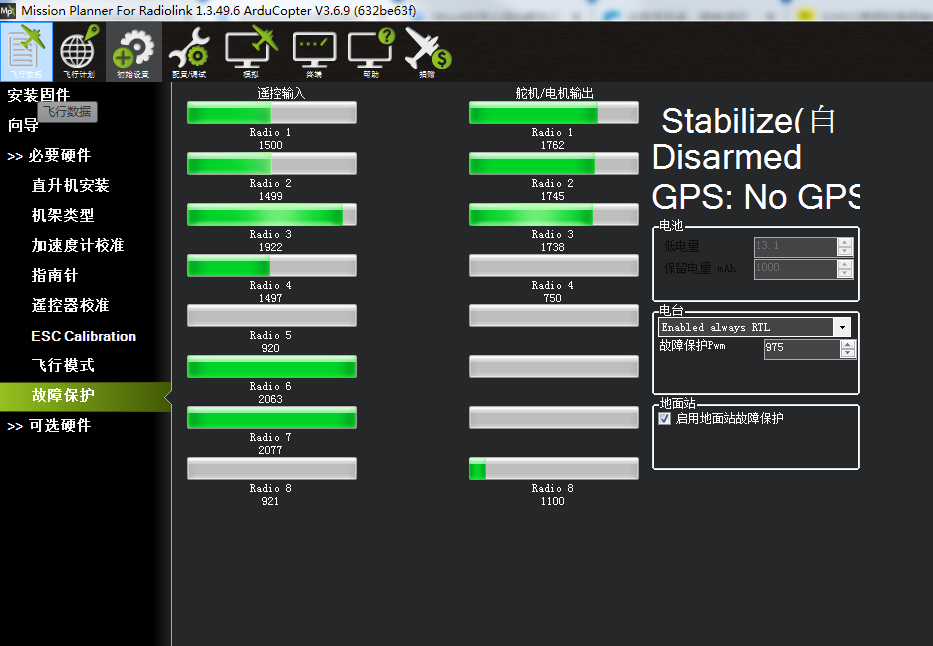
舵机输出Ridio4的中立位置已经变成750,修改成功,窄频舵机可以使用了。

