
-


- 2023-05-23
- 2023-05-18
- 2022-07-06
- 2022-06-24
- 2022-06-23
- 2022-06-22
- 2022-06-21
- 2022-06-21
- 2022-06-17
- 2022-06-16
- 2022-06-15
-

- 2024-01-24
- 2024-03-28
- 2022-07-06
- 2022-07-09
- 2024-04-11
- 2022-07-07
-




-
-





")
")


























")
")
")








")










")








































在此之前先了解下姿态角(Roll、Pitch、Yaw),如下图所示
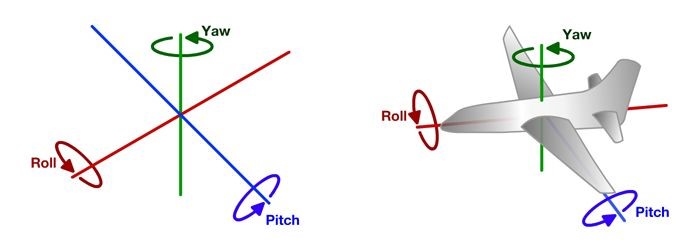
1、俯仰角θ(pitch):围绕X轴旋转的。
2、偏航角ψ(yaw):围绕Z轴旋转的角度。
3、滚转角Φ(roll):围绕Y轴旋转的角度。
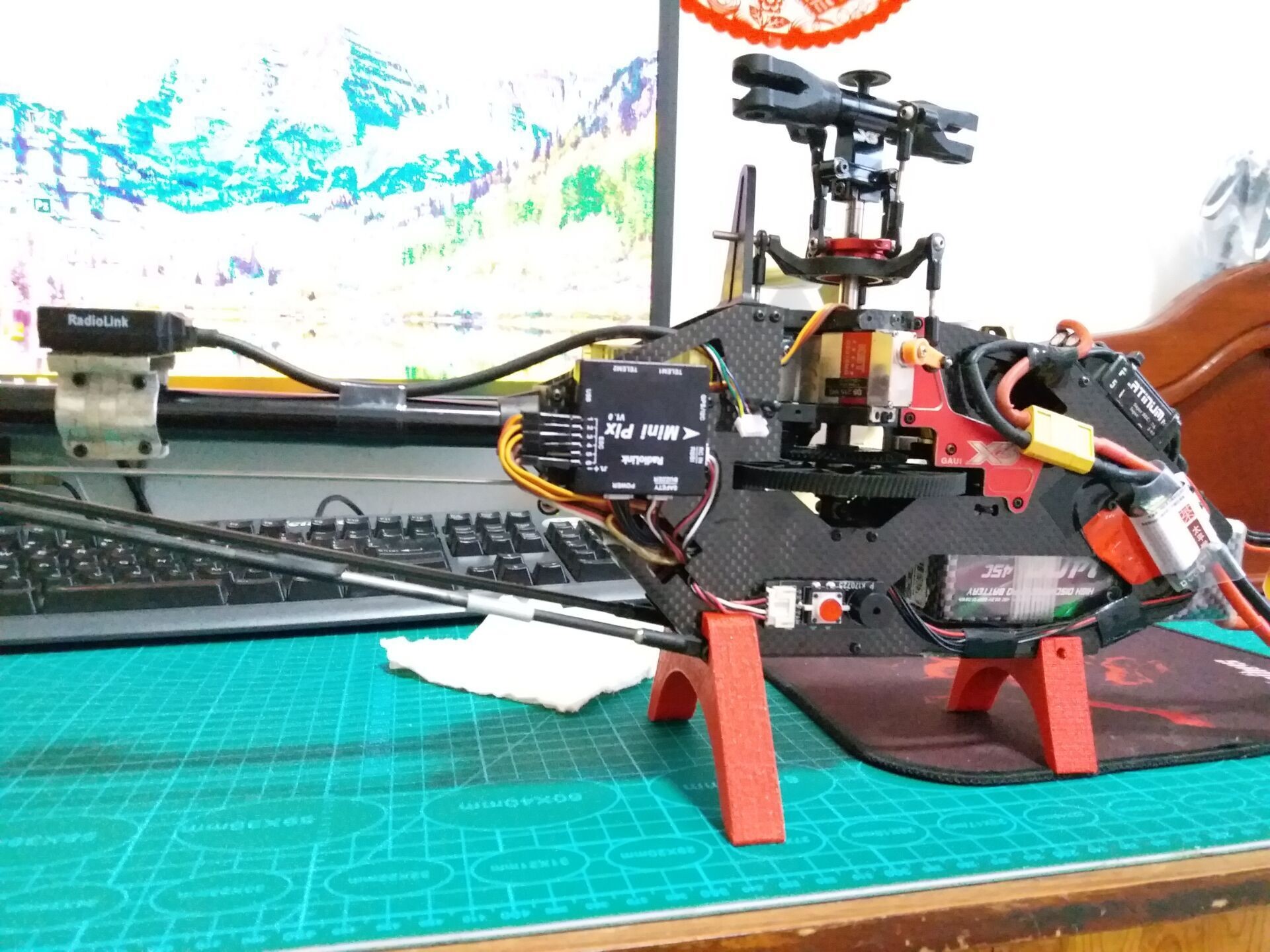
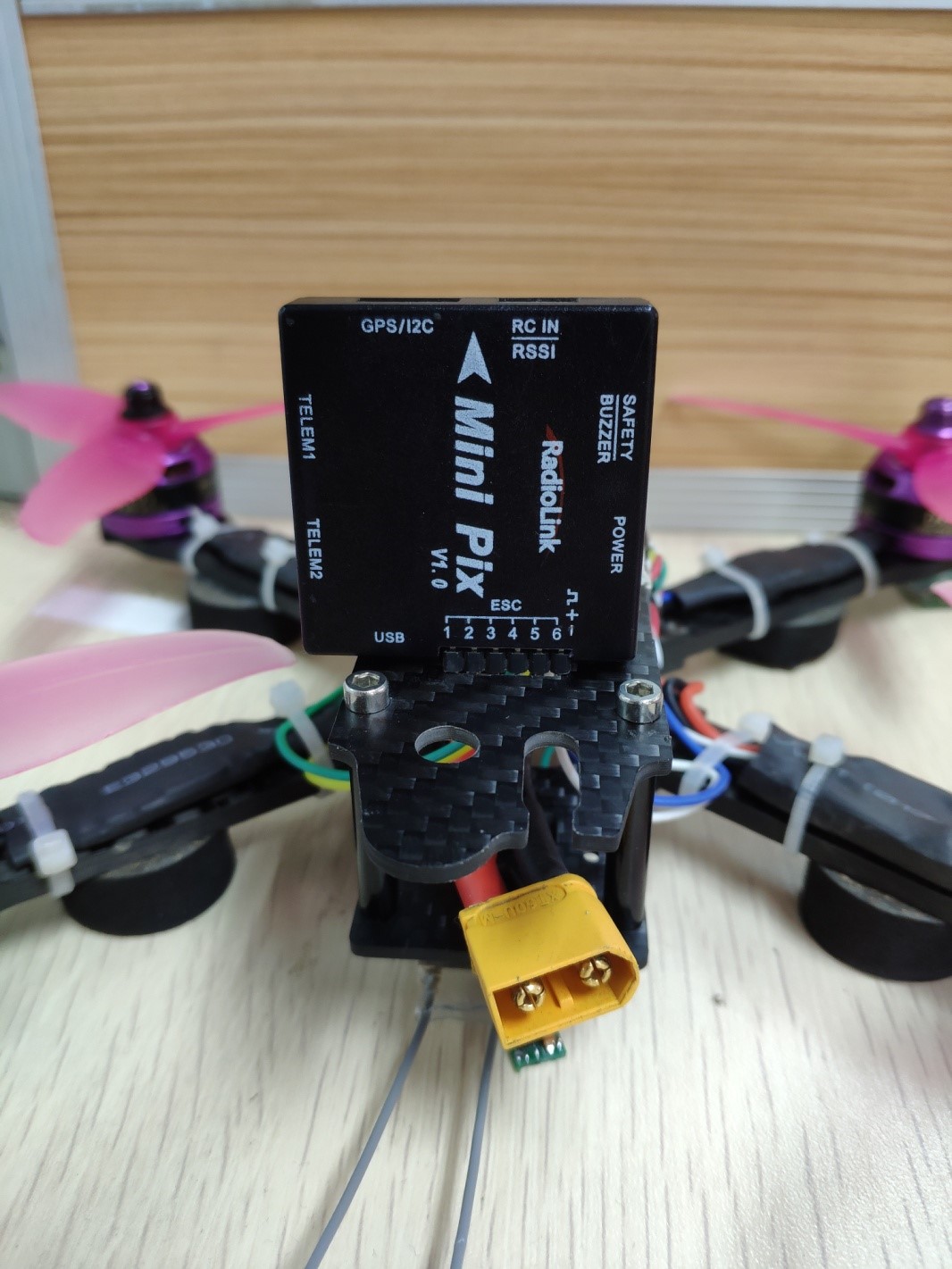
一般我们在安装PIXHAWK和MINIPIX飞控系统的时候都是使用它默认参数,正常安装如下图所示
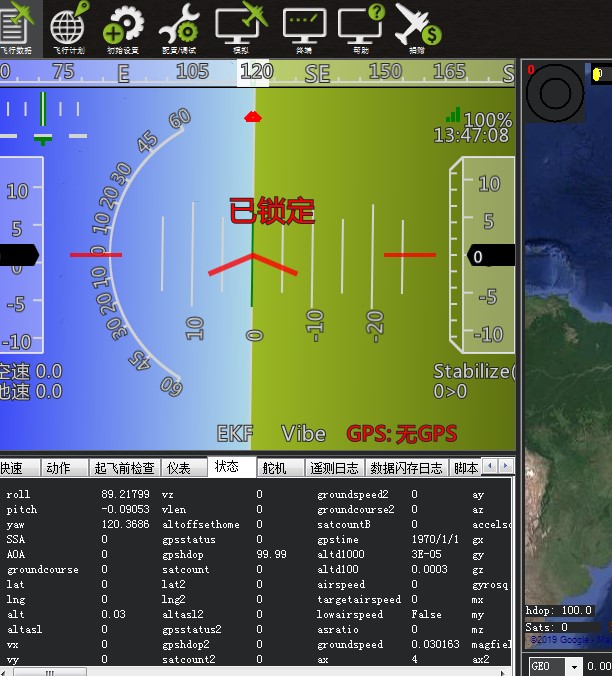
连接地面站可以看到此时的水平面和姿态是正常的

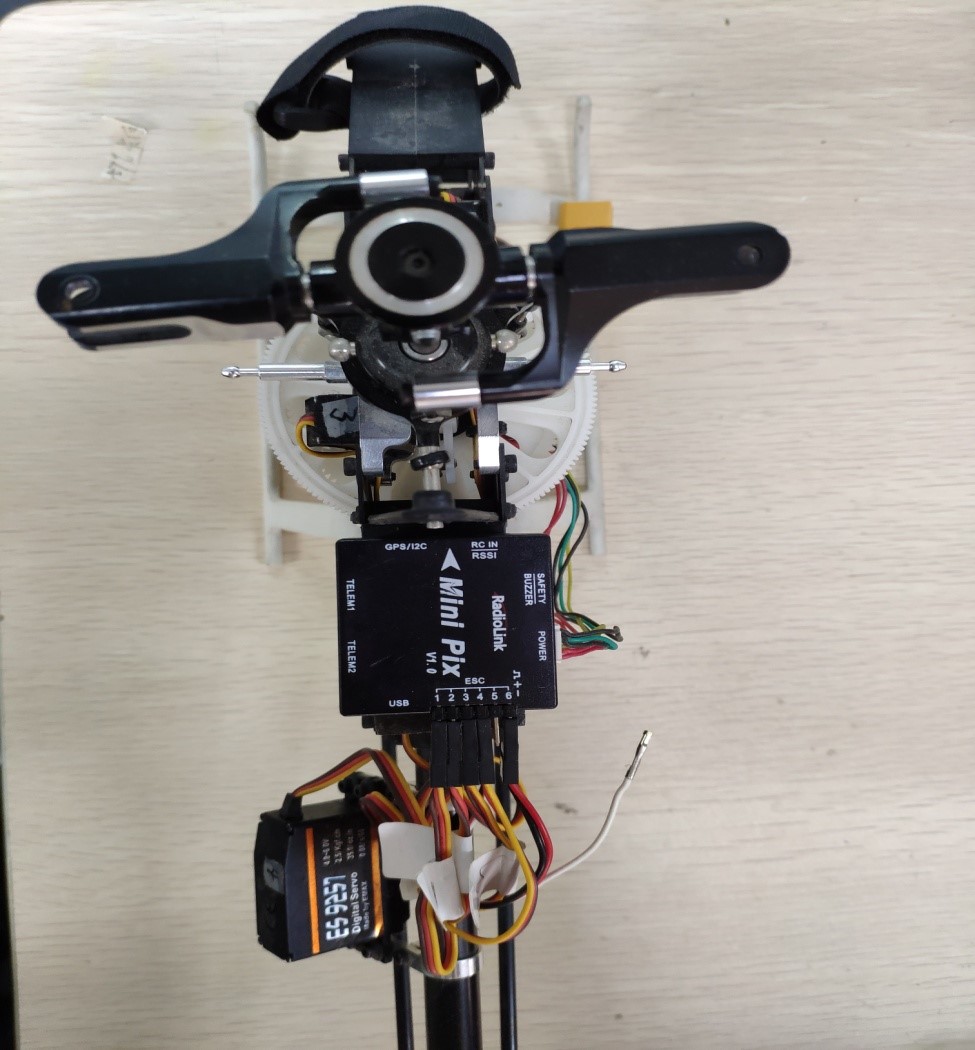
但是有的飞机,特别是直升机,没有足够的水平面或者不方便正常安装,如下图所示
这样飞控围绕Y轴逆时针旋转了九十度。
这样飞机是不能正常飞行的,这时需要修改AHRS_ORIENTATION的参数,步骤如下1软件配置—2全部参数表-3右下搜索框输入AHRS_ORIENTATION
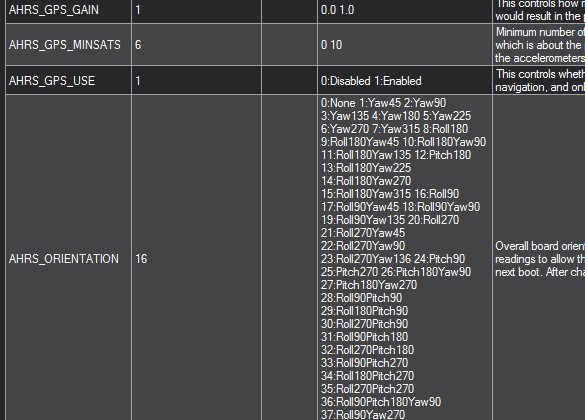
默认的参数值为0,将参数值改为16:roll 90,点击写入参数到飞控,确认,
然后在硬件配置-加速度计校准-校准水平,重新校准水平。
同样的,如果飞控安装与标准方向形成了俯仰角度差(即绕X轴旋转),只需将AHRS_ORIENTATION的参数
值修改为Pitch+角度差即可,比如绕X轴旋转90度,则参数值改为Pitch 90,如下图
如果绕Z轴旋转90度安装,参数值改为YAW 90,如下图
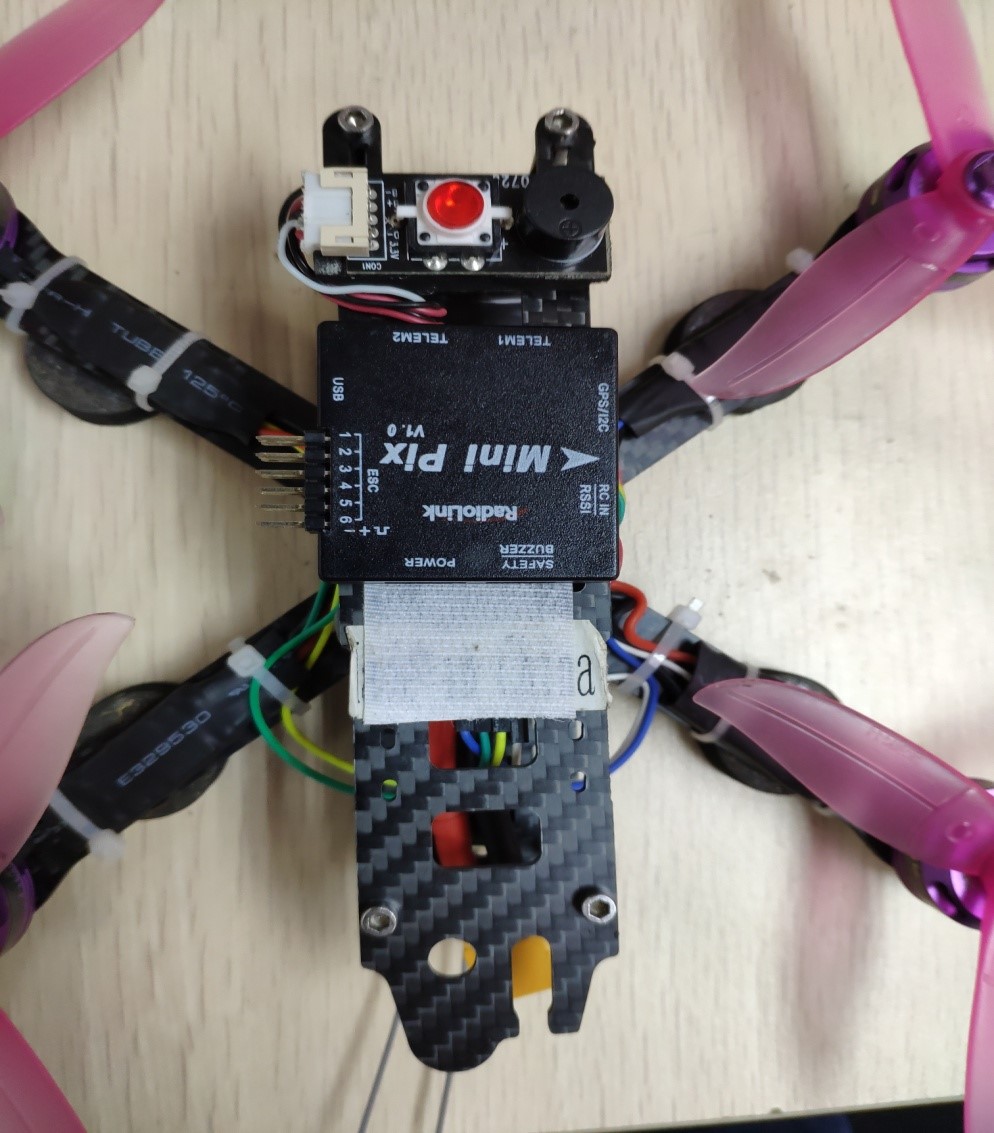
蜂鸣器为机头方向。

