


































































 简体中文
简体中文 English
English
搜索结果建议
快速链接
SUI04 FAQ
Q: Is RadioLink ultra sensor module SUI04 compatible to flight controllers of other brands?
Q: Is RadioLink ultra sensor module SUI04 compatible to flight controllers of other brands?
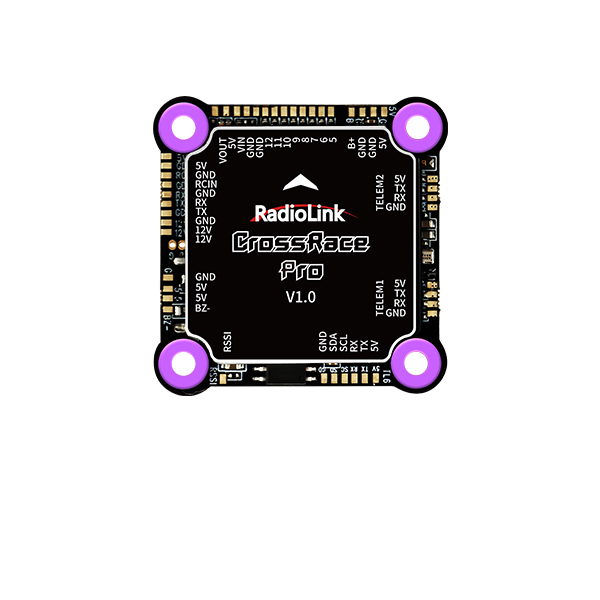
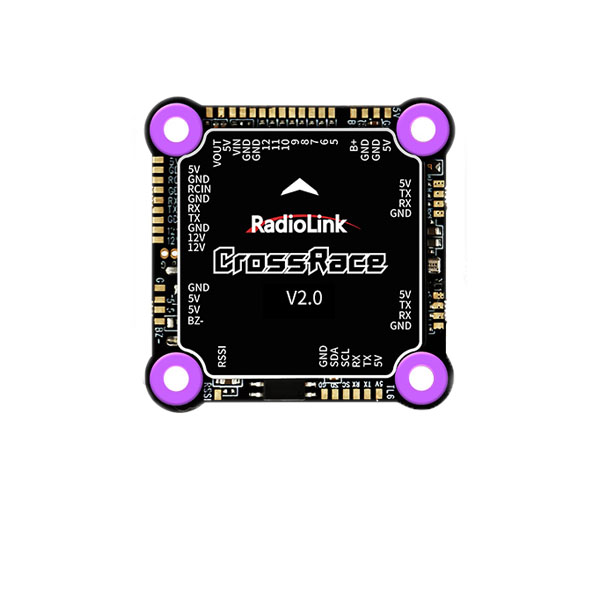
A: No. This SUI04 module is only compatible with the RadioLink flight controllers, CrossRace, CrossFlight, Mini Pix, PIXHAWK, and TURBOPIX.
Attention: the firmware needs to be upgraded to V3.5.7 or above via the links below if works with Mini Pix, PIXHAWK, and TURBOPIX.
Mini Pix/TURBO PIX http://www.radiolink.com.cn/firmware/Copter/ultrasonic_avoid/Multiple/minipix.px4
PIXHAWK http://www.radiolink.com.cn/firmware/Pixhawk/avoid_multiple/Pixhawk.px4
SUI04 Firmware(for Obstacle Avoidance Function, Adaptable to Multirotor only):https://www.radiolink.com.cn/sui04_firmware
Q: Which aircraft models are compatible with Radiolink SUI04?
Q: Which aircraft models are compatible with Radiolink SUI04?
A: SUI04 is only compatible with multi-rotor aircraft.
Q: When SUI04 is installed and done with parameter setting in RadioLink Mission Planner, why is there no module data displays?
Q: When SUI04 is installed and done with parameter setting in RadioLink Mission Planner, why is there no module data displays?
A: Make sure that it's the RadioLink flight controller used and the FC firmware is correct so that the module can function.
The SUI04 module is only compatible with the RadioLink flight controllers MINIPIX/PIXHAWK/TURBOPIX and the firmware needs to be upgraded to V3.5.7 or above via the below links.
SUI04 Firmware(for Obstacle Avoidance Function, Adaptable to Multirotor only):https://www.radiolink.com.cn/sui04_firmware
Q: How to identify the corresponding directions of various modules used?
Q: How to identify the corresponding directions of various modules used?
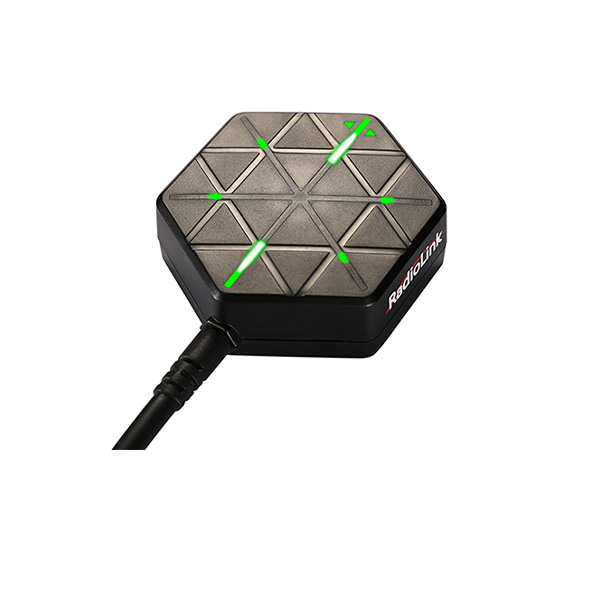
A: RadioLink flight controllers PIXHAWK/Mini Pix/TURBO PiX supports 6 SUI04 modules working simultaneously to avoid obstacles from forward/backward/left/right/upward/downward as alt-holding so it needs to be set. With every press of the button, the module direction changes clockwise and the module LED flashes. Different flash frequencies mean different directions. Once-Front, Twice-Right, 3 Times-Back, 4 Times-Left, 5-Times-Downward, 6 times-Upwards. Every direction changed, and the flight controller and the module needed to be restarted.
Q: Can the obstacle avoidance function be activated when setting flight mode as Alt-Hold?
Q: Can the obstacle avoidance function be activated when setting flight mode as Alt-Hold?
A: Never switch to Alt-Hold Mode when using the obstacle function. Because at Alt-Hold Mode, the aircraft will keep flying with the command from the transmitter even obstacle is around and won't stop. Only when the Loiter Mode is on, the aircraft will stop automatically when an obstacle is confronted, no matter how far the joysticks are toggled. Thus, it's strongly advised to set flight mode as Loiter if the avoidance function is activated.
Q: How do I open the obstacle avoidance data display interface in Mission Planner for the SUI04?
Q: How do I open the obstacle avoidance data display interface in Mission Planner for the SUI04?
A: Press Ctrl+ F On the home page of the Mission Planner. Once the list appears, check "Proximity" to enable the display.
Q: After successfully configuring the SUI04 and SU04 ultrasonic obstacle avoidance modules, why does the device continue to move forward—and fail to stop—even when an object is detected at a distance shorter than the set obstacle avoidance threshold?
Q: After successfully configuring the SUI04 and SU04 ultrasonic obstacle avoidance modules, why does the device continue to move forward—and fail to stop—even when an object is detected at a distance shorter than the set obstacle avoidance threshold?
A: Please verify whether the current mode is Manual Mode. Obstacle avoidance functionality is not supported in Manual Mode; in other modes, the stop function should trigger normally.
Q: How to turn off the obstacle avoidance function?
Q: How to turn off the obstacle avoidance function?
A: As the function is on at Alt-Hold Mode by default, it needs to be turned off. CONFIG/TUNING- Full Parameter List- AVOID_DIST_MAX, set the value as 0.
Q: Why is there notice of bad LiDAR Health popping out in RadioLink Mission Planner?
Q: Why is there notice of bad LiDAR Health popping out in RadioLink Mission Planner?
A:
1) PRX_TYPE value is incorrect. E.g. PRX_TYPE value is set as 4 without SUI04 connected. To turn off SUI04, the PRX_TYPE value should be set as 0.
2) The connection between SUI04 and the flight controller is wrong. Please follow the detailed steps in the user manual via the below link and double-confirm.
Q: Why is there notice of PreArm: Proximity X deg,0.40m popping out in RadioLink Mission Planner?
Q: Why is there notice of PreArm: Proximity X deg,0.40m popping out in RadioLink Mission Planner?
A: When the detective distance to the obstacle from SUI04 is less than 40cm, the flight controller cannot be armed. Please move the aircraft away from the obstacle more than 40cm to the arm. So when installing SUI04, make sure to avoid any possible cover on the module such as receiver antenna or GPS.
Q: Why the data displays are unusual in Mission Planner when connecting Radiolink flight controller to SUI04?
Q: Why the data displays are unusual in Mission Planner when connecting Radiolink flight controller to SUI04?
A: Make sure that the Mission Planner used is the latest version developed by RadioLink. Click the below link to download
Q: What flight mode should be set when using SUI04?
Q: What flight mode should be set when using SUI04?
A: When the installation of the flight controller is done and data output/displays work, essential flight mode needs to be set. The basic modes include: 1-Stabliize, 2-Loiter. It's advised to select Loiter Mode when using the obstacle avoidance function.
Q: Does the memory card need to be taken out when connecting SUI04 to the flight controller?
Q: Does the memory card need to be taken out when connecting SUI04 to the flight controller?
A: Yes, for Mini Pix and TURBO PiX but no for PIXHAWK. Please take out the memory card when using Mini Pix and TURBO PiX with SUI04.
Q: Can the address of the SUI04 be customized?
Q: Can the address of the SUI04 be customized?
A: No. But the direction of SUI04 downward can be setup by pressing the button on SUI04. The corresponding addresses are different in different directions. Each time the button is pressed, the direction of the module changes clockwise, and the module light will flash the corresponding number of times (1 time for front, 2 times for right, 3 times for back, 4 times for left), indicating the current direction.
The addresses in each direction are as follows:
The forward address is 116; the backward address is 114; the left address is 115; the right address is 113; the upward address is 117; the downward address is 112.





 简体中文
简体中文- English