


































































 简体中文
简体中文 English
English
搜索结果建议
快速链接
Specifications
Aircraft
Weight of Drone (Without Battery): | 1028g |
Takeoff Weight Without Load: | 1800g |
Standard Payload: | 3kg |
Max Payload: | 6kg |
Dimension Frame: | 355*355*131.5mm |
Diagonal Length: | 435mm |
Flight Time: | 10 minutes with 3KG Payload, 28 minutes without load |
Frame Name: | FlyFishRC Matador XL10 Frame |
Material Frame: | Carbon fiber |
Max Ascent Speed: | 2.6m/s(Alt-Hold Mode or Pos-Hold Mode), 11m/s (Stabilize Mode) |
Max Descent Speed: | 2.8m/s (Alt-Hold Mode) |
Max Horizontal Speed (at sea level, no wind): | 120(±20)km/h(Manual Mode and Without load), 47km/h (30°)/63km/h (35°) |
Max Takeoff Altitude: | 4000 meters |
Max Tilt Angle: | 30°/35° |
Operating Temperature: | -30° to 85° C |
Flight Distance: | 3400 meters (2.11 miles, AT10II/AT9S Pro/T16D/T12D)/2000 meters (1.24 miles, T8S/T8FB), maximum range is tested in an unobstructed area free of interference |
Max Service Ceiling Above Sea Level: | Same as the flight distance, the flight distance and height can be set as you need in the GeoFence of Mission Planner |
Maximum Wind Resistance: | Moderate breeze |
Flight Modes: | It is default with Stabilize Mode, Alt-Hold Mode, Pos-Hold Mode, and RTL. 13 modes can be set in the Mission Planner, including Auto Mode, Guided Mode, and flight following the waypoint, etc. |
Positional Accuracy: | Up to 50 centimeters |
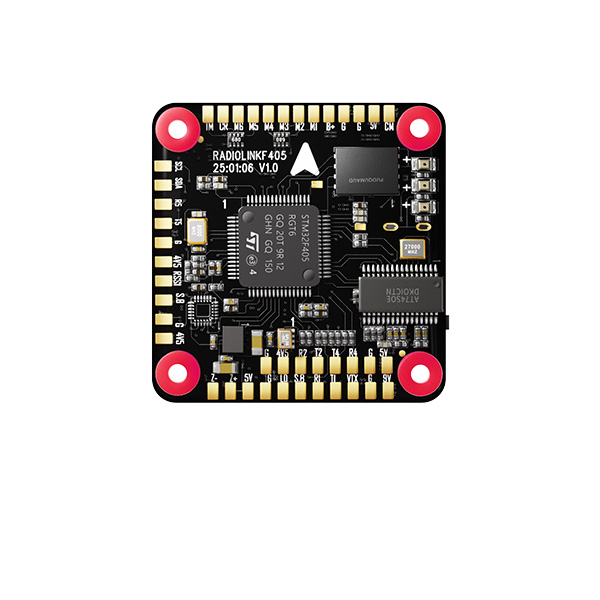
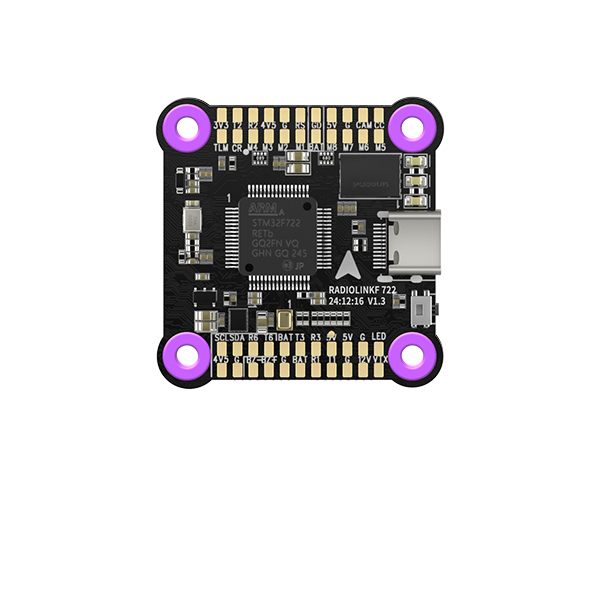
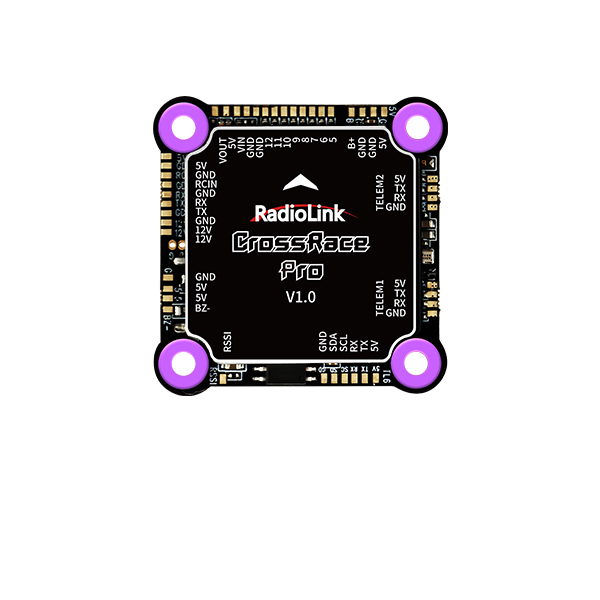
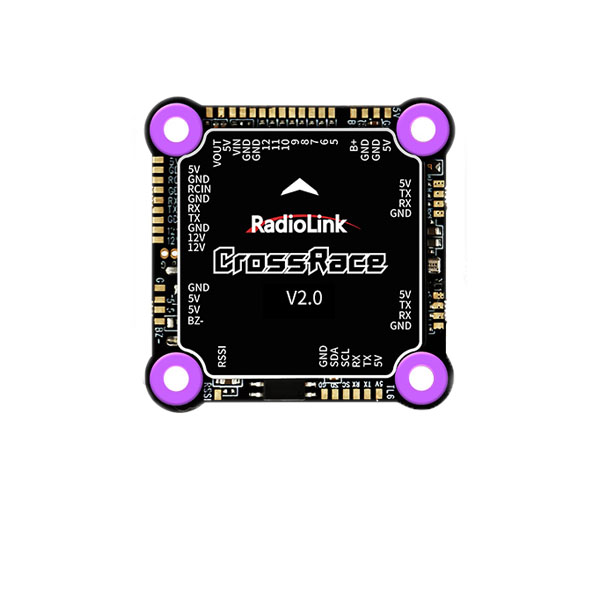
Flight Control System: | Radiolink CrossRace, which with OSD module integrated |
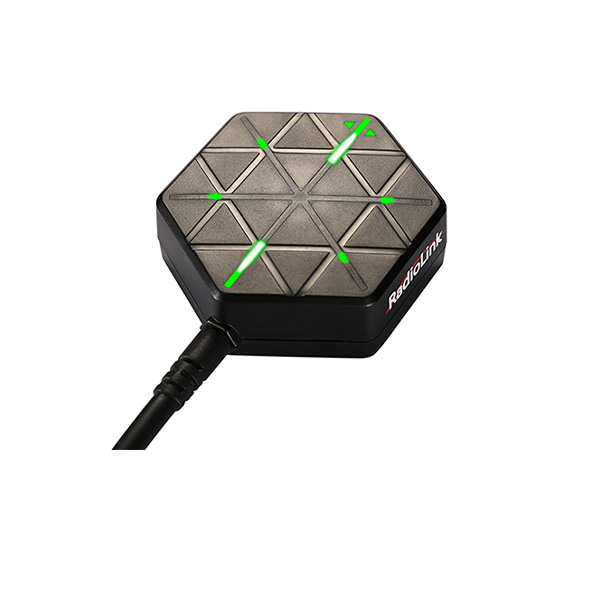
Global Navigation Satellite System: | TS100, BD1+GPS/L1+Galileo/E1+GLonass/G1, and quad satellite system operation at the same time are available. |
Motor: | SZ-SPEED 2810/2812 900KV Motor |
Electronic Speed Control (ESC): | FLYCOLOR 55A 4in1 ESC |
Battery: | FULLYMAX 6250mAh 22.2V 30C XT60 Battery(Battery can be selected) |
Propeller: | Gemfan 10*5*3 Propellers |
Hook for Payload: | 6kg metal digital servo with hardware hook |
Power System
Transmitter: | 16-channel transmitter T16D, 12-channel transmitter AT9S Pro/AT10II/T12D, 8-channel transmitter T8FB/T8S can be selected |
Receiver: | R12DSE (AT9S Pro/AT10II), R16SM, R8FM, R8SM, R8XM(T16D/T12D/T8FB/T8S) |
Frequencies Band: | 2.4GHz ISM(2400MHz~2483.5MHz) |
Transmission Power: | <100mW(20dBm) |
Operating Temperature: | -30° to 85° C |
Control Distance: | 3400 meters (AT10II/AT9S Pro), 3000 meters (T16D/T12D), 2000 meters (T8S/T8FB), maximum range is tested in an unobstructed area free of interference |
Remote Control System
(Accessories Can Be Selected)
Charger System
(Accessories Can Be Selected)
Charger: | HOTA D6 Pro |
Charging Input: | AC 100~240V/DC 6.5~30V |
Compatible Battery: | LiHV/LiPo/LiFe/Lilon/Lixx: 1~6S NiZn/NiCd/NiMH: 1~16S Smart Battery: 1~6S Lead Acid(Pb): 1~12S(2~24V) Eneloop: 1~16S |
Charging Current: | 0.1~15A(with twice charging ports) |
Power: | DC 325W(with twice charging ports)@input voltage>24V, AC 200W |
Model: | Avatar V2 module |
Communication Frequency: | 5.725-5.850GHz |
Transmitter Power(EIRP): | FCC:<30dBm; CE:<14dBm; SRRC:<20dBm; MIC:<25dBm |
I/O Interface: | JST1.0*4(power cable);JST0.8*6(USB) |
Recording: | 1080P/720P |
Latency: | Average delay 22ms |
Average Gain: | 1.9dBi |
Transmission Distance: | >4km |
Channels: | 8 |
Wide Power Input: | 6-25.2V(2S-6S) |
Storage: | 8G/32G |
HD Digital Video Transmission
Video Transmission(Accessories Can Be Selected)
Camera
(Accessories Can Be Selected)
Model: | Avatar HD pro |
Image Sensor: | 1/1.8-Inch sony starvis2 sensor |
Resolution: | 1080P/60fps;720P/100fps;720P/60fps |
Ratio: | 4/3, 16/9 |
Lens: | 8Mp |
FOV: | 160° |
Aperture: | F1.6 |
Shutter: | Rolling shutter |
Min. Illumination: | 0.0001Lux |
Coaxial Cable: | 140mm |
Model: | Avatar HD Goggles X |
Communication Frequency: | 5.725-5.850GHz |
Transmitter Power(EIRP): | FCC:<30dBm; CE:<14dBm; SRRC:<20dBm; MIC:<25dBm |
I/O Interface: | HDMI Out, HDMI Input, 5Pin 3.5mm Audio Port, DC5.5*2.1mm Port, Micro SD Card Slot |
Transmission Resolution: | 1080p 100fps, 1080p 60fps, 720p 100fps, 720p 60fps |
Code Rate: | Max 50 Mbps |
Min. Latency: | Average 22ms |
Average Gain: | 2dBi |
Polarization: | LHCP |
Transmission Distance: | >4km |
Channels: | 8 |
Screen Resolution: | 1920*1080/100Hz |
Screen Material: | OLED |
IPD Mechanical Range: | 57mm-72mm |
Adjustable Focus Range: | +2.0 to -6.0 Diopter |
FOV: | 50° |
Power Input: | 7-26V(2S-6S) |
SD Card: | Support 256G |
Goggles
(Accessories Can Be Selected)
Dimension: | 123*79mm |
Model: | 5-inch IPS FPV Monitor |
Resolution: | 800*480 |
Color Space: | 50% NTSC |
Brightness: | 300cd/m2 |
Interface: | mini HDMI*1, micro USB*1 |
FPV Monitor
(Accessories Can Be Selected)
Analog Video Transmission
Video Transmission(Accessories Can Be Selected)
Model: | ZENCHANSI BROWN BEAR 008 |
Communication Frequency: | 5.725-5.850GHz |
Power: | 500mW/200mW/600mW/Power off(PitMode) |
Current(12V): | 350mA(50mW)/510mA(200mW)/750mA(600mW) |
Input Voltage: | 7-24V DC |
Antenna: | MMCX ANT |
Dimension: | 27*27*4.8mm(1.06"*1.06"*0.19") |
Model: | Caddx sable camera |
Sensor: | 1/2.8” Inch Starlight Sensor |
Resolution: | 1200TVL |
FOV: | 130°(4:3) / 165°(16:9) |
Image: | 4:3 & 16:9(Switchable) |
Min. Illumination: | 0.001LUX |
Wide Power Input: | 4.5-36V |
Working Temperature: | -20°C ~ +60°C |
Weight: | 5.9g |
Dimension: | 19*19*20mm |
Camera
(Accessories Can Be Selected)
Goggles
(Accessories Can Be Selected)
Model: | EWRF 3.0 Inches FPV Goggles |
Communication Frequency: | 5.362-5.945GHz |
Resolution: | 480*272 |
Display Ratio: | 16:9 |
Brightness: | 230cd/m² |
Video Formats: | NTSC/PAL |
Power Adapter: | DC 5V/1.5A (USB interface) |
Battery: | 3.7V/1800mAh, each full charge revive around 3.5hr working time |
Working Time: | 3.5 hours |
FPV Monitor
(Accessories Can Be Selected)
Model: | Hawk eye all-in-one 4.3 inch FPV Monitor |
Resolution: | 480*3(RGB) *272 |
Backlight: | LED |
Brightness: | 500 cd/m2 |
Aspect Ratio: | 16:9 |
Response Time: | 10ms |
Color System: | PAL/NTSC |
Working Time: | About 2.5 hours |
Input Signal: | Video (PAL/NTSC) |
Output Signal: | Video |
Antenna Interface: | RP-SMA |
Sensitivity: | -94db |
More Accessories Select Option
Ultrasonic Sensor: | Radiolink SU04 to realize obstacle avoidance of maximum 2 directions (forward/backward/left/right/upward) and altitude hold downward |
SiK Radio Telemetry: | 915Mhz/433Mhz |





 简体中文
简体中文- English