


































































 简体中文
简体中文 English
English
搜索结果建议
快速链接
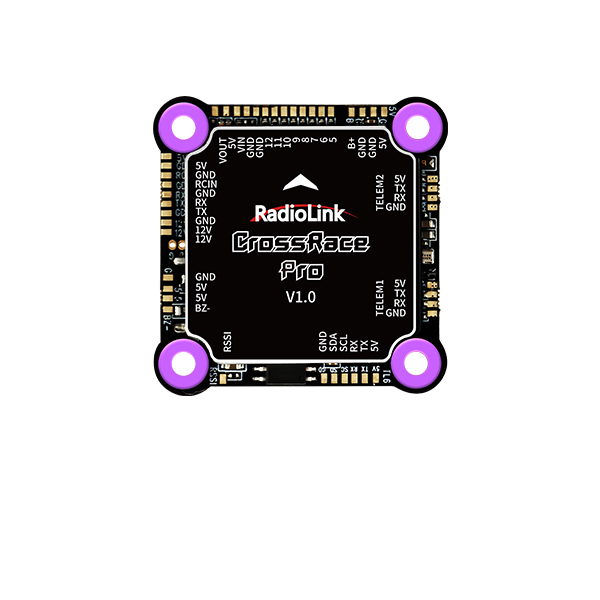
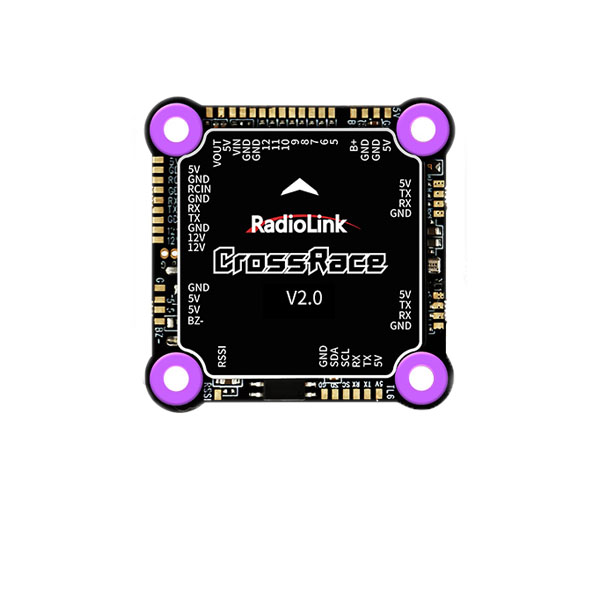
CrossRace Pro User Manual(in PDF)






 简体中文
简体中文- English
FC for Fixed Wing
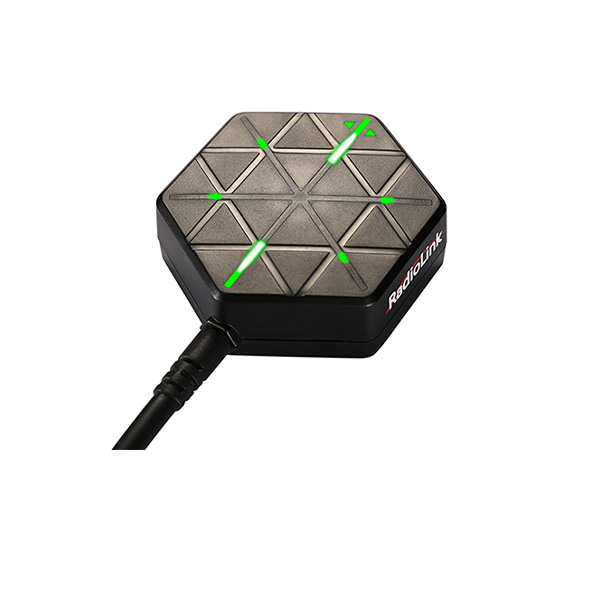
GPS
RTK Kit
12C Boards
Ultrasonic Sensor
Digital Video
Transmission Adapter Board
NEW
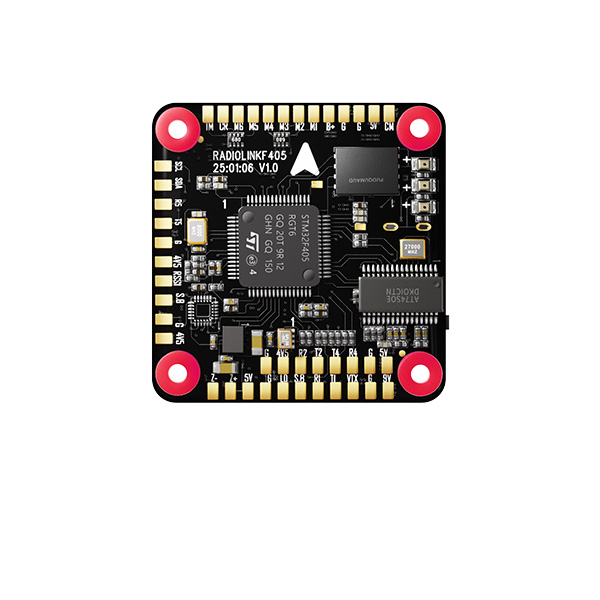
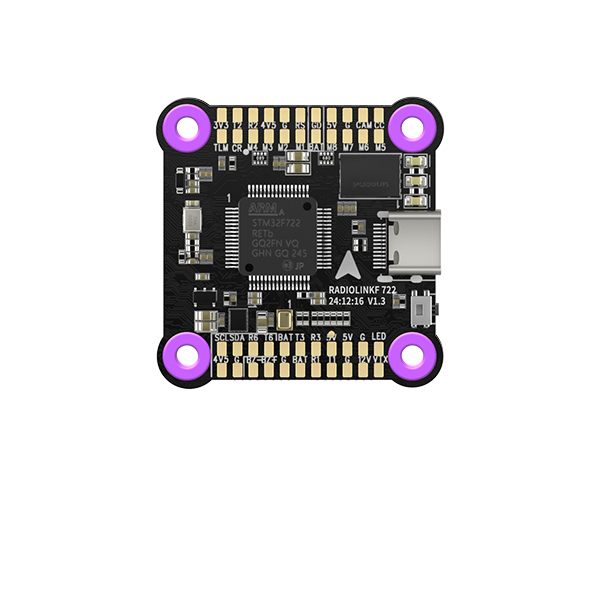
Flight Controller(Mission Planner)
NEW
简体中文EnglishCrossRace Pro User Manual(in PDF)
简体中文English